การบริหารงานบุคคลในอุตสาหกรรมการท่องเที่ยว คุณสมบัติของการบริหารงานบุคคลในสถานประกอบการอุตสาหกรรมบริการและการท่องเที่ยว วัตถุประสงค์ของงานนี้ได้แก่
การดำเนินการหาเหตุผลตามแผนความสูงของ
ในการสำรวจพื้นที่ นอกเหนือจากจุดต่างๆ ของเครือข่าย geodetic ของรัฐแล้ว ยังมีการสร้างเหตุผลเชิง geodetic ที่วางแผนไว้และในระดับความสูงสูงอีกด้วย เหตุผลในการสำรวจที่วางแผนไว้สำหรับการสำรวจขนาดใหญ่ (1:5,000 - 1:500) ตามกฎแล้วคือทางเดินกล้องสำรวจที่วางระหว่างจุดต่างๆ ของเครือข่าย geodetic ของรัฐ การสำรวจเส้นทางสำรวจของกล้องสำรวจสามารถปิดหรือเปิดได้ ขึ้นอยู่กับจุดสองจุดที่มีพิกัดที่ทราบ เมื่อทำการสำรวจพื้นที่ขนาดเล็ก อนุญาตให้วางกล้องสำรวจสำรวจโดยไม่ต้องเชื่อมโยงไปยังจุดต่างๆ ตามเกณฑ์ภูมิศาสตร์ของรัฐ นอกจากนี้ กล้องสำรวจยังถูกวางเมื่อทำการวัดโครงสร้างทางสถาปัตยกรรมและใช้เป็นพื้นฐานในการวางแผนสำหรับการวัดรายละเอียดด้านหน้าและภายใน มีวิธีอื่นๆ ในการสร้างเหตุผลเชิงภูมิศาสตร์ที่วางแผนไว้: สามเหลี่ยมระดับไมโคร ไปข้างหน้า ข้างหลัง และทางแยกแบบรวม
เหตุผลในการสำรวจพื้นที่สูงตามกฎแล้วคือหลักสูตรการปรับระดับที่วางตามจุดของหลักสูตรกล้องสำรวจ
วัตถุประสงค์: เพื่อเรียนรู้วิธีการสร้างเหตุผลที่วางแผนไว้ในสถานที่ก่อสร้างเพื่อรวบรวมทักษะในการวัดมุมและระยะทางในแนวนอนบนพื้นดินเพื่อเรียนรู้วิธีการประมวลผลการวัด geodetic อย่างอิสระและคำนวณพิกัดของจุดให้เหตุผล เครื่องมือและอุปกรณ์เสริม: กล้องสำรวจ ขาตั้ง สามเสา เครื่องมือวัด หมุดสำหรับยึดส่วนบนของเส้นขีด ค้อน บันทึกการวัดมุมแนวนอนและความยาวเส้น เครื่องคิดเลขขนาดเล็กหรือตารางส่วนเพิ่ม พิกัด แบบฟอร์มการคำนวณพิกัด ดินสอ ปากกา กระดาษวาดรูป สมุดจดงาน
รูปที่ 7 - รูปแบบการให้เหตุผลตามแผน:
เอ - รูปหลายเหลี่ยม; b - การเคลื่อนไหวตามจุดเริ่มต้นเดียว
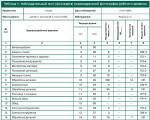
ก่อนเริ่มงานจะมีการจัดทำตารางการแบ่งความรับผิดชอบ กราฟตัวอย่างสำหรับทีมที่มีนักเรียน 5 คน (A, B, C, D, E) ที่เกี่ยวข้องกับแผนการเคลื่อนไหวในรูปที่ 7 a แสดงอยู่ในตารางที่ 2
เหตุผลในการสำรวจที่วางแผนไว้สร้างขึ้นโดยการวางการสำรวจสำรวจกล้องสำรวจหลักและแนวทแยง การเคลื่อนที่ของกล้องสำรวจหลักนั้นขึ้นอยู่กับจุดสองจุดของโครงข่ายจีโอเดติกอ้างอิง (ดูรูปที่ 7, a) หรือวางในรูปแบบของรูปหลายเหลี่ยมปิด (รูปที่ 7, b) ซึ่งเป็นจุดที่
ตั้งอยู่ตามแนวขอบของสถานที่โดยประมาณ
เส้นทาง I-VI-V ที่วางอยู่ภายในสนามฝึกเพื่อสำรวจสถานการณ์ เรียกว่าแนวทแยง งานภูมิสารสนเทศภาคสนามเมื่อสร้างเหตุผลในการสำรวจประกอบด้วย:
การลาดตระเวน (ศึกษา) ของสถานที่;
การวัดมุมแนวนอน
การวัดความยาวด้าน
การคำนวณพิกัดของจุดเหตุผลในการสำรวจ
หากการเคลื่อนที่ของกล้องสำรวจไม่ได้ขึ้นอยู่กับจุดเริ่มต้นของคลาสระดับสูง พวกมันก็จะสร้าง
การเชื่อมโยงเหตุผลของการสำรวจที่วางแผนไว้กับเครือข่ายการสนับสนุน
ตารางที่ 3 - ตารางการกระจายความรับผิดชอบ


การลาดตระเวนไซต์
การลาดตระเวนทำหน้าที่ในการเลือกตำแหน่งขั้นสุดท้ายของจุดยอดการเคลื่อนที่ของกล้องสำรวจบนพื้น และการเชื่อมโยงเหตุผลในการสำรวจไปยังจุดต่างๆ ของโครงข่ายจีโอเดติก
การลาดตระเวนดำเนินการภายใต้คำแนะนำโดยตรงของครูและการมีส่วนร่วมของสมาชิกในทีมทุกคน จุดยอดด้านหนึ่งของการสำรวจกล้องสำรวจของกล้องสำรวจนั้นถือเป็นจุดเริ่มต้นและยึดด้วยป้ายชั่วคราว (ท่อโลหะที่มีเส้นผ่านศูนย์กลาง 2 - 3 ซม. ไม้ค้ำยัน หมุดไม้ ฯลฯ ) จุดยอดที่อยู่ติดกันจะถูกเลือกในลักษณะที่สะดวกในการวัดเชิงมุมและเชิงเส้นตลอดจนการสำรวจ ระหว่างจุดยอดที่อยู่ติดกันจะต้องมีการมองเห็นร่วมกันที่ดีและเงื่อนไขที่เอื้ออำนวยสำหรับการวัดเชิงเส้น
ในการตรวจสอบทัศนวิสัย เสาจะถูกติดตั้งไว้ที่จุดยอดที่อยู่ติดกันของการเคลื่อนที่ของกล้องสำรวจ
ทัศนวิสัยระหว่างจุดต่างๆ ถือว่าดีหากมองเห็นเสาที่ความสูง 3/4 หลังจากกำหนดทัศนวิสัยแล้ว จุดเริ่มต้นได้รับการแก้ไขในที่สุด (ขับเคลื่อนด้วยระดับพื้นดิน) และกระบวนการลาดตระเวนดำเนินต่อไป โดยเคลื่อนไปยังจุดถัดไป เพื่อให้หาจุดได้ง่ายขึ้นจึงขุดร่องลงไป ขณะเดียวกันทีมต่างใช้ รูปทรงต่างๆสนามเพลาะ เมื่อสิ้นสุดการฝึกซ้อม หลังจากที่หัวหน้าภาคสนามส่วนหนึ่งของงานรับงานแล้ว ให้ตอกหมุดออกจากพื้น
ห้ามติดตั้ง (แก้ไข) จุดสำรวจกล้องสำรวจบนถนนหรือบนทางเดินเท้า
การวัดมุมแนวนอน
ก่อนเริ่มงานจะต้องตรวจสอบกล้องสำรวจทั้งหมดให้เสร็จสิ้นและต้องเปรียบเทียบอุปกรณ์วัด
โดยทั่วไปแล้ว มุมภายในของรูปหลายเหลี่ยมจะถูกวัด หากสนามวางตามเข็มนาฬิกา จะมีการวัดมุมขวาตลอดสนาม วงกลมแนวนอนจะวัดที่จุดก่อนหน้าก่อนแล้วจึงวัดที่จุดถัดไป ดังนั้น ณ จุดที่ 2 การนับจะนับไปที่จุดที่ 1 และจากนั้นจึงไปที่จุดที่ 3 หากวางสนามทวนเข็มนาฬิกามุมซ้ายของสนามจะถูกวัดนั่นคือการอ่านจะดำเนินการครั้งแรกในครั้งก่อนและจากกระแสที่ตามมา
จุดที่กล้องสำรวจวางอยู่เพื่อทำการวัดเรียกว่าสถานี กล้องสำรวจจะถูกนำเข้าในแต่ละสถานี ตำแหน่งการทำงาน: อยู่ตรงกลางจุดยอดของมุม; นำแกนแนวตั้งของอุปกรณ์มาอยู่ในตำแหน่งแนวตั้ง เตรียมกล้องโทรทรรศน์สำรวจ
การวางกล้องสำรวจไว้ตรงกลางด้านบนของมุมนั้นทำได้โดยใช้เส้นดิ่งหรือดิ่งแบบออพติคอล ยิ่งด้านข้างของการสำรวจด้วยกล้องสำรวจสั้นลง อุปกรณ์ก็จะยิ่งอยู่ตรงกลางมากขึ้นเท่านั้น ข้อผิดพลาด mc ในการวัดมุมเพื่อจัดกึ่งกลางสามารถคำนวณได้ก่อนเริ่มการวัดโดยใช้สูตร
 ,
,
โดยที่ t β คือข้อผิดพลาดในการวัดมุม D คือความยาวของด้านที่สั้นที่สุดของมุม
เราได้รับข้อผิดพลาด m c เท่ากับครึ่งหนึ่งของข้อผิดพลาด m β และความยาวของด้านสั้น D = 100 ม.

จากนี้ไปเมื่อทำงานกับกล้องสำรวจที่มีความแม่นยำ 30 วินาทีที่ด้านข้างของมุม D = 100 ม. ข้อผิดพลาดในการตั้งศูนย์กลางไม่ควรเกิน 7 มม. ด้านที่สั้นกว่า ข้อผิดพลาดในการตั้งศูนย์กลางควรเล็กลง แกนแนวตั้งถูกนำเข้าสู่ตำแหน่งลูกดิ่งโดยใช้ระดับทรงกระบอกและสกรูยกสามตัว
หลังจากติดตั้งกล้องสำรวจในตำแหน่งที่ใช้งานแล้ว ให้เริ่มวัดมุมของระยะชัก เมื่อใช้สองทิศทางที่สถานี มุมจะถูกวัดโดยใช้วิธีวัดครึ่งหนึ่ง ถ้าจำนวนทิศทางมากกว่าสองให้ใช้วิธีวงกลม
ความคลาดเคลื่อนระหว่างค่ามุมในการวัดครึ่งหนึ่งไม่ควรเกินความแม่นยำของเครื่องมือถึงสองเท่า ผลลัพธ์สุดท้ายจะใช้ค่าเฉลี่ยเลขคณิตของมุมจากสองครึ่งก้าว สำหรับการกำหนดแนวเส้นขวางของกล้องสำรวจ เช่นเดียวกับการควบคุมการวัดมุม
ขอแนะนำให้นับราบแม่เหล็กของด้านข้างของสนามโดยใช้เข็มทิศแล้วจดบันทึกลงในสมุดบันทึก
การวัดด้านข้างของการสำรวจด้วยกล้องสำรวจ
การวัดด้านข้างของการสำรวจด้วยกล้องสำรวจจะดำเนินการโดยการวางเทปวัดตามแนวเส้นตามลำดับ เทปวัดหรือสายวัดไม่ควรเบี่ยงเบนไปจากเป้าหมาย เพื่อระบุการวางแนวของเส้นที่ยาวเกิน 150 ม. จะต้องติดตั้งเสาเพิ่มเติม ก่อนทำการวัด จำเป็นต้องเคลียร์บริเวณที่มีวัตถุแปลกปลอม (หิน เศษหิน ฯลฯ)
การเชื่อมโยงเหตุผลในการวางแผนกับจุดของเครือข่ายจีโอเดติกอ้างอิง
ในกรณีที่สถานที่สำรวจอยู่ห่างจากจุดของเครือข่ายพิกัดทางภูมิศาสตร์อ้างอิง จะมีการวัดพิกัดทางภูมิศาสตร์เพิ่มเติมเพื่อให้ได้พิกัดสี่เหลี่ยมของจุดเหตุผลในการวางแผน ดังนั้น ในรูปที่ 6 b นอกเหนือจากมุมภายในและด้านข้างของการสำรวจกล้องสำรวจหลักแล้ว ยังมีการวัดมุมเพิ่มเติมอีกสองมุมที่จุด VII และ pz 7110 รวมถึงความยาวของด้าน pz 7110 - VII
การประมวลผลผลการวัด- งานคำนวณเริ่มต้นด้วยการตรวจสอบวารสารภาคสนามมือสอง หากงานนี้ยังไม่เสร็จสมบูรณ์ ข้อผิดพลาดในการคำนวณภาคสนามจะถูกค้นพบหลังจากที่วัสดุได้รับการประมวลผลอย่างสมบูรณ์แล้วเท่านั้น ซึ่งจะทำให้เกิดการทำซ้ำงานทั้งหมด
จากนั้น ในบันทึกประจำวัน การวัดมุมแนวนอนจะสร้างแผนภาพการทำงานของการสำรวจมุมกล้องสำรวจ แผนภาพแสดงจุดของโครงข่ายจีโอเดติกอ้างอิง ทิศทางเริ่มต้น ด้านบนและด้านข้างของการสำรวจผ่านกล้องสำรวจ จุดเริ่มต้นและด้านข้างจะแสดงเป็นสีแดง ชื่อของจุดค่าของมุมแนวนอนและความยาวของด้านข้างจะถูกเขียนลงบนแผนภาพ สำหรับการวางแนว ลูกศรบนแผนภาพจะแสดงทิศทางเหนือ-ใต้
การคำนวณพิกัดของจุดยอดของการสำรวจกล้องสำรวจจะดำเนินการในแผ่นพิเศษ (ตารางที่ 4) ตามลำดับต่อไปนี้:
1. จากแผนภาพการเคลื่อนที่ของกล้องสำรวจ ในคอลัมน์ที่ 1 ของข้อความ ให้จดชื่อของจุดเริ่มต้นและจุดยอดของการเคลื่อนที่ของกล้องสำรวจหลัก โดยเริ่มจากทิศทางอ้างอิง pz 7109-pz 7108 และไปยังทิศทาง pz 7109-pz 7109 และจากบันทึกการวัดมุม ให้จดค่าในคอลัมน์ 2
วัดมุมและตรวจสอบกับแผนภาพจังหวะเพื่อควบคุม
จากบันทึกการวัดเส้น เขียนลงในคอลัมน์ 6 ค่าของระยะทางแนวนอน d i และตรวจสอบการควบคุมด้วยแผนภาพการเคลื่อนที่ของกล้องสำรวจ
2. ในคอลัมน์ 4 ให้เขียนค่าของมุมทิศทางเริ่มต้นα 7109-7108 และในคอลัมน์ 11 และ 12 - abscissa และพิกัดของจุด 7108 และ 7109 ข้อมูลต้นฉบับจะถูกป้อนด้วยสีแดง
3. คำนวณผลรวมของมุมที่วัดได้ในคอลัมน์ 2 และคำนวณความคลาดเคลื่อนเชิงมุมของการเคลื่อนที่
![]() , (5)
, (5)
โดยที่ Σβ t คือผลรวมทางทฤษฎีของมุมเส้นซึ่งคำนวณโดยใช้สูตร:
Σβ t = α n - α k + 180° (n + 1) - สำหรับมุมขวา
Σβ t = α k - α n + 180° (n + 1) - สำหรับมุมซ้าย
Σβ t = 180° (p - 2) - สำหรับรูปหลายเหลี่ยมปิด
โดยที่ α n และ α k เป็นมุมอ้างอิงทิศทางของด้านเริ่มต้นและด้านสุดท้ายของจังหวะ n คือจำนวนด้านของการเคลื่อนที่
ตารางที่ 4 - รายการการคำนวณพิกัดของจุดยอดแกนของการเคลื่อนที่ของกล้องสำรวจหลัก

ความคลาดเคลื่อนที่ได้จากสูตร (5) จะถูกเปรียบเทียบกับค่าที่ยอมรับได้

หากความคลาดเคลื่อนเชิงมุมมากกว่าที่ยอมรับได้ คุณจะต้องตรวจสอบการคำนวณมุมเป็นครั้งที่สองในบันทึกภาคสนาม จากนั้นตรวจสอบมุมโดยใช้ราบแม่เหล็กของด้านข้างของเส้นทาง และระบุว่ามุมใดที่จำเป็นต้องเป็น วัดอีกครั้งบนพื้นดิน
ต้องจำไว้ว่าราบแม่เหล็กสามารถเปิดเผยได้เฉพาะข้อผิดพลาดร้ายแรงในการวัดมุมเท่านั้น ถ้าความคลาดเคลื่อนเชิงมุมน้อยกว่าที่ยอมรับได้ ความคลาดเคลื่อนเชิงมุมจะกระจายเท่ากันทุกมุม การแก้ไข δ β ซึ่งคำนวณโดยใช้สูตร

ปัดเศษให้ใกล้ที่สุด 0.1′
ถ้า f β ไม่หารด้วย n ลงตัวโดยไม่มีเศษ การแก้ไขค่าสัมบูรณ์ที่มากขึ้นจะถูกนำมาใช้ในมุมที่มีด้านสั้น
ในการสำรวจกล้องสำรวจที่มีความยาวสั้น สามารถแก้ไขมุมที่วัดได้เพื่อให้มุมถูกปัดเศษเป็นนาทีทั้งหมด
สำหรับการควบคุม จะมีการคำนวณจำนวนการแก้ไข โดยจะต้องเท่ากับยอดคงเหลือที่มีเครื่องหมายตรงกันข้าม
4.ตามสูตร

คำนวณค่ามุมที่ถูกต้องและจดไว้ในคอลัมน์ที่ 3 ของคำสั่ง ผลรวมของมุมที่แก้ไขจะต้องเท่ากับผลรวมทางทฤษฎีของมุมเส้นขีดทุกประการ
5. การใช้ค่ามุมที่ถูกต้องจะคำนวณมุมทิศทางของด้านข้างของเส้นขีด:
α i + 1 = α i ± 180° - β - สำหรับมุมขวา (6)
α i + 1 = α i + β ± 180° - สำหรับมุมซ้าย (7)
ตารางที่ 5 - การแปลงมุมทิศทางเป็นตลับลูกปืน

โดยที่ α i และ α i + 1 เป็นมุมทิศทางของด้านก่อนหน้าและด้านถัดไปของเส้นขีด การคำนวณเริ่มต้นด้วยมุมทิศทาง α n ของด้านเดิม ในตาราง 5 คือด้านของ pz 7109 - pz 7108
ตัวอย่างแสดงลำดับการบันทึกเมื่อคำนวณมุมทิศทางโดยใช้สูตร (7) สำหรับตารางที่ 2

ความถูกต้องของการคำนวณจะถูกตรวจสอบโดยความเท่าเทียมกันของค่าที่คำนวณได้และค่าเริ่มต้นของมุมทิศทางสุดท้าย ในตัวอย่างที่กำลังพิจารณา ค่านี้สำหรับด้าน pz 7109 - pz 7108 เท่ากับ α k = 339°03.2′ มุมทิศทางของด้านข้างเขียนไว้ในคอลัมน์ที่ 4
6. หากควรจะกำหนดการเพิ่มขึ้นของพิกัดโดยใช้ตาราง ทิศทางของด้านข้างจะถูกเขียนในคอลัมน์ 5
ในการกำหนดชื่อและคำนวณจังหวะรุมบา ให้ใช้ข้อมูลที่ระบุในตารางที่ 3
7. ในคอลัมน์ที่ 6 ของแผ่นคำนวณ ให้คำนวณความยาวของเส้นขีด

8. การเพิ่มพิกัดคำนวณโดยใช้สูตร ∆х = dcosα และ ∆y = dsinα
การเพิ่มขึ้นจะคำนวณโดยใช้เครื่องคิดเลขหรือใช้ตารางส่วนเพิ่ม
ตารางที่ 6 - โปรแกรมคำนวณการเพิ่มพิกัด

ลำดับสำหรับการคำนวณการเพิ่มพิกัดบนเครื่องคิดเลขไมโครประเภท "Electronics B3-18M" แสดงไว้ในตารางที่ 6 (โดยใช้ตัวอย่างด้านข้างของกล้องสำรวจสำรวจ V-pz 7109 ด้วยค่า α = 238°24.5" และ d = 58.74 ม)
การคำนวณ ∆ x และ ∆ y โดยใช้ตารางการเพิ่มพิกัดเริ่มต้นด้วยการเตรียมตารางพิเศษในสมุดงาน การออกแบบตัวอย่างแสดงไว้ในตารางที่ 5 ค่าของ ∆ x และ ∆ y มีหน่วยเป็น 1′ สำหรับระยะทางแนวนอน 10, 20, ..., 90 ม. ดังนั้นค่า d จึงถูกแบ่งออกเป็นร้อย สิบ หน่วยและเศษส่วนของเมตร และเลือกส่วนเพิ่มที่เหมาะสมเพื่อให้ปัดเศษเป็นเศษหนึ่งในร้อยของเมตร ซึ่งเป็นค่าสุดท้าย
การเพิ่มพิกัดจะพบเป็นผลรวมของค่าที่ได้รับปัดเศษเป็น 0.01 ม.
สัญญาณของการเพิ่มพิกัดขึ้นอยู่กับค่าของมุม α หรือชื่อของทิศทาง ดังนั้น ∆x มีเครื่องหมายบวกที่มุม α ตั้งแต่ 0° ถึง 90° (NE) และจาก 270° ถึง 360° (NW) และ ∆y มีเครื่องหมายบวกที่มุม a ตั้งแต่ 0 ถึง 180° กล่าวคือ (NE และ SE) ในกรณีอื่นๆ ทั้งหมด การเพิ่มขึ้น ∆х และ ∆у จะมีเครื่องหมายลบ
ตารางที่ 7 - การคำนวณการเพิ่มพิกัดจากตาราง d = 58.74; r = SW: 58°24′

การเพิ่มขึ้นของพิกัดที่คำนวณหรือพบจากตารางจะถูกบันทึกในคอลัมน์ 7 และ 8 ของตารางที่ 4 ด้วยความแม่นยำ 0.01 ม.
เพื่อควบคุมการเพิ่มขึ้น จะมีการคำนวณสองครั้ง ขอแนะนำให้นักเรียนทำการคำนวณโดยใช้วิธีการต่างๆ: ตาราง (ตารางที่ 7) และเครื่องคิดเลขขนาดเล็ก
9. คำนวณค่าคงเหลือโดยเพิ่มพิกัดตามแต่ละแกนและเปรียบเทียบกับค่าที่ยอมรับได้
ผลรวมทางทฤษฎีของการเพิ่มพิกัดตามแกนจะเท่ากับ
โดยที่ X k, Y k และ X n, Y n คือพิกัดของจุดสิ้นสุดและจุดเริ่มต้นของการสำรวจกล้องสำรวจตามลำดับ สำหรับการเคลื่อนที่ของกล้องสำรวจแบบปิด (เมื่อ X k = X n และ Y k = Y n)
![]()
จากผลการวัดมุมและเส้น ข้อผิดพลาดเกิดขึ้นในการเพิ่มพิกัด ภายใต้อิทธิพลของสิ่งนั้น

ปริมาณเหล่านี้เรียกว่าปริมาณคงเหลือ โดย f x ตามแกน X และ f y ตามแกน Y
ตารางที่ 8 - รายการการคำนวณพิกัดของจุดยอดของเส้นทแยงมุม
กล้องสำรวจสำรวจ

ในการสำรวจกล้องสำรวจตามจุดอ้างอิงสองจุด ความคลาดเคลื่อนในการเพิ่มพิกัดตามแกนจะถูกคำนวณโดยใช้สูตร
ความคลาดเคลื่อนในเส้นรอบวงซึ่งกำหนดโดยสูตร

ถือว่ายอมรับได้หากไม่เกิน 1:2000 ของเส้นรอบวง R
10. หากยอมรับความคลาดเคลื่อนในเส้นรอบวงได้ ความคลาดเคลื่อนตามแกน f x และ f y จะถูกกระจายด้วยเครื่องหมายตรงข้ามกับการเพิ่มขึ้นทั้งหมดตามสัดส่วนความยาวของระยะทางแนวนอน การแก้ไขเพื่อเพิ่มพิกัดจะคำนวณโดยใช้สูตร

การควบคุมการกระจายตัวของสารตกค้างที่ถูกต้องนั้นดำเนินการตามการพึ่งพา

การแก้ไขจะถูกปัดเศษเป็น 0.01 ม. และค่าผลลัพธ์เป็นเซนติเมตรจะถูกบันทึกในคอลัมน์ 7 และ 8 เหนือการเพิ่มพิกัด
11. ค่าที่ถูกต้องของการเพิ่มขึ้น ∆x′ i และ ∆y′ i คำนวณโดยใช้สูตร
และเขียนแผ่นคำนวณในคอลัมน์ 9 และ 10
การควบคุมการคำนวณดำเนินการตามสูตร

12. คำนวณพิกัดของจุดยอดของการสำรวจกล้องสำรวจ
โดยที่ X i-1, Y i-1 และ X i, Y i คือพิกัดของจุดยอดก่อนหน้าและจุดยอดถัดไปของกล้องสำรวจสำรวจ
ความถูกต้องของการคำนวณจะถูกตรวจสอบโดยบังเอิญของพิกัดที่คำนวณได้ของจุดสิ้นสุดของการสำรวจกล้องสำรวจ ในตัวอย่างของเรา (ดูตารางที่ 4) นี่คือพิกัดของ PZ 7109
พิกัดของจุดในการเคลื่อนที่ของกล้องสำรวจในแนวทแยงได้รับการคำนวณในทำนองเดียวกัน ตัวอย่างการประมวลผลแสดงไว้ในตารางที่ 8
การสร้างเครือข่ายสนับสนุนการสำรวจเหมืองหิน
เครือข่ายการสำรวจแกนหลัก (MBN) -เป็นระบบจุดที่คงที่บนพื้นผิวโลกและในการทำงานของฉัน
มันถูกสร้างขึ้นสำหรับการเตรียมเอกสารกราฟิกการขุดและสำหรับการแก้ปัญหาการสำรวจ
พื้นฐานของการประกันสุขภาพภาคบังคับ
1. คะแนนของเครือข่าย geodetic ของรัฐ (คลาส I, II, III, IV)
2. เครือข่ายการควบแน่น
เงื่อนไขการสร้างประกันสุขภาพภาคบังคับ:
1. จุดต่างๆ ควรอยู่เท่าๆ กันตามด้านข้างของเหมืองหิน
2. ต้องมีการมองเห็นทุกรายการ
3. ดูแลความปลอดภัยของสิ่งของมาเป็นเวลานาน
4. คำนึงถึงแนวโน้มการพัฒนา การดำเนินการเหมืองแร่
หากอาณาเขตถูกสร้างขึ้นให้สร้างอย่างน้อย 4 จุดต่อ 1 กม. 2 หากไม่ได้สร้างขึ้นให้สร้าง 1 จุดต่อ 1 กม. 2
จุดของเครือข่ายระดับความสูงอ้างอิงจะถูกกำหนดโดยการปรับระดับคลาส III และ IV
CHI สามารถสร้างขึ้นได้โดยใช้เครื่องรับ GPS
เครือข่ายการถ่ายทำ
22.การสร้างเครือข่ายการสำรวจที่เหมืองหิน (วิธีขั้วโลก กล้องสำรวจ)
เครือข่ายการถ่ายทำ- จำนวนจุดพร้อมพิกัดที่ทราบ สร้างขึ้นบนพื้นฐานของสิ่งอ้างอิง
วิธีขั้วโลก – ใช้ในเหมืองหินที่พื้นที่การทำเหมืองถูกลบออกจากจุดฐาน geodetic อย่างมีนัยสำคัญ ระยะทางวัดด้วยเครื่องวัดระยะแสง มุมวัดโดย T5, T15, T30
ทางเดินกล้องสำรวจ – ในเหมืองหินที่มีส่วนหน้างานยาวและแท่นทำงานกว้างของหิ้ง การเคลื่อนไหวปิดระหว่างจุดแนวรับ ความยาววัดด้วยสายวัดหรือเรนจ์ไฟนเดอร์
23. การสร้างเครือข่ายการสำรวจสำรวจที่เหมืองหิน (ส่วนต่างๆ วิธีกริดปฏิบัติการ)
การสร้างเครือข่ายการสำรวจการสำรวจในเหมืองหินดำเนินการโดยใช้เซอริฟ
เครือข่ายการสำรวจ– โครงข่ายจุดต่างๆ สม่ำเสมอทั้งบนพื้นผิวและภายในเหมืองหิน ใช้สำหรับสำรวจการทำงานของเหมืองและแก้ไขปัญหาการทำเหมือง
บนขอบ ระยะห่างระหว่างจุดต่างๆ ของเครือข่ายการสำรวจ เช่น ระหว่างการสำรวจความเร็ว ไม่ควรเกิน 300-400 ม.
1- จีโอเดติกเซอริฟ– ใช้เพื่อแทรกแต่ละจุด หากมั่นใจในการมองเห็นจุดควบคุมจากขอบการทำงาน
- เซอริฟตรง– เพื่อให้มั่นใจในความแม่นยำของมุม ณ จุดที่กำหนดระหว่างคานทั้งสองจะต้องอยู่ระหว่าง 30 ถึง 120 องศา อย่างน้อย 2 ร่อง
- การผ่าตัด– ช่วยให้คุณลดงานภาคสนามให้เหลือน้อยที่สุด ความแม่นยำขึ้นอยู่กับข้อผิดพลาดของจุดเริ่มต้น
- เซอริฟด้านข้าง
การสร้างตารางการดำเนินงาน.
ใช้เมื่อพัฒนาคราบโดยใช้วิธีขุดไฮดรอลิกและหากเหมืองอยู่บนพื้นผิวเรียบและไม่ลึก ตารางการปฏิบัติงานจะถูกสร้างขึ้น ซึ่งแสดงถึงเครือข่ายของช่องสี่เหลี่ยม - ด้านบนของช่องสี่เหลี่ยมคือจุดสำรวจ เราเลือกฐานที่มั่นและจัดวางแนวการเคลื่อนที่แบบหลายเหลี่ยม
24. รายละเอียดการยิงในเหมืองหิน
วัตถุสำรวจ: องค์ประกอบของการทำงานในเหมือง โครงสร้างอุตสาหกรรม ถนน สายไฟ งานสำรวจ (หัวหลุม จุดเก็บตัวอย่าง) ที่ทิ้งดิน โกดัง
ขอบจะถูกลบออกทุกเดือนและวัตถุอื่นๆ จะถูกลบออกตามความจำเป็น
วิธีที่ใช้ในการสำรวจเหมืองหิน:
1. วัดความเร็ว- สำหรับเหมืองขนาดเล็ก การถ่ายภาพเฉพาะจุด ระยะห่างระหว่างจุด 50 ม. อุปกรณ์ต้องอยู่ห่างจากจุดไม่เกิน 100 ม. ผลลัพธ์ทั้งหมดจะถูกบันทึกไว้ในสมุดบันทึก
2. สเตอริโอโฟโตแกรมเมตริก- (สแกนเนอร์) - ในเหมืองขนาดใหญ่ ข้อดีของวิธีนี้คืองานภาคสนามดำเนินไปอย่างรวดเร็ว ข้อเสียคืออุปกรณ์ราคาแพง
3. วิธีการตั้งฉาก- ควรมีด้านหนึ่งของการสำรวจด้วยกล้องสำรวจถัดจากรูปร่าง โดยวางตั้งฉากกับจุดที่มีลักษณะเฉพาะ
การสำรวจภูมิประเทศเป็นงานเชิงภูมิศาสตร์ที่ซับซ้อนซึ่งดำเนินการภาคพื้นดินเพื่อจัดทำแผนที่และแผนภูมิประเทศ มีการสำรวจเพื่อจัดทำแผนภูมิประเทศขนาดใหญ่ (1:500, 1:1000, 1:2000, 1:5000) และขนาดเล็ก (1:10000, 1:25000 และเล็กกว่า) ในการตรวจวัดทางวิศวกรรม การสำรวจขนาดใหญ่จะดำเนินการเป็นหลัก
องค์ประกอบทั้งหมดของสถานการณ์ภูมิประเทศ อาคารที่มีอยู่ ภูมิทัศน์ การสื่อสารใต้ดินและพื้นผิว ตลอดจนภูมิประเทศ จะถูกยิงและแสดงบนแผนภูมิประเทศ
จุดที่กำหนดตำแหน่งของรูปทรงของสถานการณ์ในแผนนั้นแบ่งออกเป็นแบบทึบและไม่ทึบตามอัตภาพ ของแข็งรวมถึงรูปทรงที่กำหนดไว้อย่างชัดเจนของโครงสร้างที่สร้างขึ้นจากวัสดุที่ทนทาน (อิฐ คอนกรีต) เช่น มุมของอาคารถาวร รูปทรงที่ไม่มีขอบเขตชัดเจน เช่น ทุ่งหญ้า ป่าไม้ พื้นที่เพาะปลูก จัดอยู่ในประเภทไม่แข็ง
จุดของเครือข่าย geodetic ที่วางแผนไว้และระดับสูงตลอดจนทุกจุดที่ทำการสำรวจหากได้รับการแก้ไขด้วยป้ายถาวรจะถูกทำเครื่องหมายไว้ในแผนภูมิประเทศ ในแผนเฉพาะไม่อนุญาตให้แสดงสถานการณ์ทั้งหมดของภูมิประเทศ แต่เฉพาะวัตถุที่จำเป็นเท่านั้น: การใช้ส่วนนูนที่ไม่ได้มาตรฐานการลดหรือเพิ่มความแม่นยำในการวาดภาพรูปทรงและการสำรวจความโล่งใจ .
การสำรวจภูมิประเทศจะดำเนินการในสามขั้นตอนหลัก:
ขั้นตอนการเตรียมการใบเสร็จ เงื่อนไขการอ้างอิงจากลูกค้าและจัดทำเอกสารสัญญา การรวบรวมและการวิเคราะห์วัสดุจากงานจีโอเดติกที่เสร็จสมบูรณ์ก่อนหน้านี้ (เครือข่ายการสำรวจ การสำรวจภูมิประเทศ ฯลฯ) สำหรับอาณาเขตที่กำหนด การลงทะเบียน (ขออนุญาต) สำหรับงานภูมิประเทศและภูมิศาสตร์
เวทีสนาม.การสำรวจการลาดตระเวนของอาณาเขตและการสร้างเครือข่ายอ้างอิงทางภูมิศาสตร์โดยใช้ GPS การสร้างเครือข่าย geodetic สำหรับการสำรวจระดับความสูงตามแผน การสำรวจภูมิประเทศ รวมถึงการสำรวจโครงสร้างใต้ดินและเหนือพื้นดิน
เวทีกล้อง.การวาด (อัปเดต) แผนภูมิประเทศ - การประมวลผลขั้นสุดท้ายของวัสดุและข้อมูลภาคสนามพร้อมการประเมินความถูกต้องของผลลัพธ์ที่ได้รับ การประสานงาน (ถ้ามี) ของการสื่อสาร (สายไฟ สายสื่อสาร ท่อหลัก ฯลฯ) ที่ทำเครื่องหมายไว้ในแผนภูมิประเทศกับองค์กรที่รับผิดชอบวัตถุเหล่านี้ จัดทำรายงานทางเทคนิค
การสำรวจภูมิประเทศจะดำเนินการจากจุดภูมิประเทศซึ่งทราบตำแหน่งในระบบพิกัดที่นำมาใช้ จุดดังกล่าวเป็นจุดอ้างอิงของรัฐบาลและเครือข่ายภูมิสารสนเทศทางวิศวกรรม อย่างไรก็ตาม จำนวนต่อพื้นที่ของพื้นที่สำรวจโดยส่วนใหญ่ยังไม่เพียงพอ ดังนั้นพื้นฐานทางภูมิศาสตร์จึงหนาขึ้นด้วยเหตุผลที่เรียกว่าการสำรวจ
เหตุผลในการสำรวจพัฒนาจากจุดของเครือข่ายสนับสนุนที่วางแผนไว้และในระดับสูง ในพื้นที่สำรวจที่มีพื้นที่ไม่เกิน 1 กม. 2 สามารถสร้างเหตุผลในการสำรวจได้ในรูปแบบของเครือข่ายอ้างอิง geodetic ที่เป็นอิสระ
เมื่อสร้างเหตุผลในการสำรวจ ตำแหน่งของจุดในแผนและความสูงจะถูกกำหนดพร้อมกัน ตำแหน่งที่วางแผนไว้ของจุดเหตุผลในการสำรวจถูกกำหนดโดย: กล้องสำรวจและการสำรวจความเร็วรอบการสร้างเครือข่ายการวิเคราะห์จากรูปสามเหลี่ยมและเซอริฟประเภทต่างๆ ความสูงของจุดเหตุผลในการสำรวจมักถูกกำหนดโดยการปรับระดับทางเรขาคณิตและตรีโกณมิติ
เหตุผลในการวางแผนการสำรวจประเภทที่พบบ่อยที่สุดคือการเคลื่อนกล้องสำรวจตามจุดเริ่มต้นหนึ่งหรือสองจุด หรือระบบการเคลื่อนที่ตามจุดเริ่มต้นอย่างน้อยสองจุด ในระบบทางเดิน ณ จุดที่พวกมันตัดกันจะมีการสร้างจุดปมซึ่งสามารถหลายทางมาบรรจบกันได้
ความยาวของกล้องสำรวจสำรวจขึ้นอยู่กับขนาดของการสำรวจและเงื่อนไขของพื้นที่ที่ทำการสำรวจ ตัวอย่างเช่น ในการสำรวจพื้นที่สิ่งปลูกสร้างในระดับ 1:5000 ความยาวการเดินทางไม่ควรเกิน 4.0 กม. ในระดับ 1:500-0.8 กม. ในพื้นที่ด้อยพัฒนา 6.0 และ 1.2 กม. ตามลำดับ ความยาวของเส้นในช่องสำรวจกล้องสำรวจไม่ควรเกิน 350 ม. และไม่น้อยกว่า 20 ม. ความคลาดเคลื่อนเชิงเส้นสัมพัทธ์ในข้อความไม่ควรเกิน 1: 2000 และภายใต้เงื่อนไขการวัดที่ไม่เอื้ออำนวย (พุ่มไม้, หนองน้ำ) - 1:1,000
มุมการหมุนที่จุดหมุนถูกวัดด้วยกล้องสำรวจที่มีข้อผิดพลาดกำลังสองเฉลี่ย 0.5" ในขั้นตอนเดียว อนุญาตให้มีความคลาดเคลื่อนระหว่างค่ามุมในครึ่งขั้นตอนไม่เกิน 0.8" ความยาวของเส้นในข้อความวัดโดยใช้เครื่องวัดระยะด้วยแสงหรือแสง เทปวัด และสายวัด วัดแต่ละด้านสองครั้ง - ในทิศทางไปข้างหน้าและย้อนกลับ อนุญาตให้มีความคลาดเคลื่อนในค่าที่วัดได้ภายใน 1:2000 ของความยาวเส้นที่วัดได้
รูปที่ 2 แผนผังการเคลื่อนที่ของกล้องสำรวจ
เมื่อกำหนดความสูงของจุดเหตุผลในการสำรวจโดยการปรับระดับทางเรขาคณิต ความคลาดเคลื่อนในหลักสูตรไม่ควรเกิน 5√Lcm โดยการปรับระดับตรีโกณมิติ - 20√Lcm โดยที่ L คือความยาวของเส้นขีด กม.
ตามกฎแล้วจุดเหตุผลในการสำรวจได้รับการแก้ไขบนพื้นดินโดยมีป้ายชั่วคราว: เสาไม้, เสา, หมุดโลหะ, ท่อ หากจุดเหล่านี้มีจุดมุ่งหมายเพื่อใช้ในอนาคตเพื่อวัตถุประสงค์อื่น จุดเหล่านั้นจะได้รับการแก้ไขโดยมีเครื่องหมายถาวร
ในการจัดทำแผนภูมิประเทศมีการใช้สิ่งต่อไปนี้: วิธีการสำรวจเชิงวิเคราะห์, เชิงเส้น, tacheometric, ภาพถ่ายทางอากาศด้วยโฟโตโทกราฟีโฟโตโอโดไลต์, การสำรวจโดยการปรับระดับพื้นผิวและการใช้เครื่องรับสัญญาณดาวเทียม การใช้วิธีการอื่นจะขึ้นอยู่กับเงื่อนไขและขนาดของการถ่ายภาพ
เมื่อพัฒนาเครือข่าย geodetic สำหรับการสำรวจโดยใช้วิธีเชิงขั้วโดยใช้เครื่องวัดวามเร็วแบบอิเล็กทรอนิกส์ ความยาวของทิศทางเชิงขั้วสามารถเพิ่มเป็น 1,000 ม. ค่าคลาดเคลื่อนกำลังสองเฉลี่ยของรูทในการวัดมุมแนวนอนไม่ควรเกิน 15 "" การเคลื่อนที่สำรวจด้วยกล้องสำรวจที่แยกจากกันจะต้องขึ้นอยู่กับจุดเริ่มต้นสองจุดและมุมทิศทางเริ่มต้นสองมุม
เมื่อสร้างเครือข่ายการสำรวจ อนุญาตให้ทำสิ่งต่อไปนี้: การวางกล้องสำรวจตามจุดเริ่มต้นสองจุด โดยไม่มีการอ้างอิงเชิงมุมกับจุดใดจุดหนึ่ง ในกรณีนี้ เพื่อควบคุมการวัดเชิงมุม มุมทิศทางที่จุดอ้างอิงของเครือข่ายจีโอเดติกอ้างอิง หรือมุมทิศทางของด้านที่อยู่ติดกัน ซึ่งได้มาจากการวัดทางดาราศาสตร์หรือการวัดอื่น ๆ (โดยมีข้อผิดพลาดกำลังสองเฉลี่ยไม่เกิน 15 "") การอ้างอิงพิกัด (ไม่มี การวัดมุมที่อยู่ติดกัน) ไปยังจุดต่างๆ ควรใช้เครือข่ายจีโอเดติกอ้างอิง โดยขึ้นอยู่กับการวัดเชิงมุมในสองขั้นตอน
ประเภทของการสำรวจด้วยกล้องสำรวจแสดงไว้ในภาพ...

รูปที่ 3 ประเภทของการสำรวจสำรวจด้วยกล้องสำรวจ
การพัฒนาเครือข่ายการสำรวจระดับความสูงตามแผนโดยใช้เครื่องวัดวามเร็วอิเล็กทรอนิกส์พร้อมการลงทะเบียนและการสะสมผลการวัด (ระยะทางแนวนอน มุมทิศทาง พิกัดและความสูงของจุดและจุด) สามารถดำเนินการพร้อมกันกับการผลิตการสำรวจภูมิประเทศ
เมื่อสร้าง (พัฒนา) เครือข่ายจีโอเดติกแบบสำรวจ ความยาวสูงสุดของการสำรวจสำรวจด้วยกล้องสำรวจและความคลาดเคลื่อนสัมบูรณ์สูงสุดควรเป็นไปตามตารางที่ 3
ตารางที่ 3
ความคลาดเคลื่อนในการเคลื่อนที่สำรวจของกล้องสำรวจ
|
ความยาวสูงสุดของการสำรวจกล้องสำรวจ, กม |
จำกัดความคลาดเคลื่อนสัมบูรณ์ของการเคลื่อนที่ของกล้องสำรวจ, m |
|||
|
มาตราส่วนการสำรวจภูมิประเทศ |
ระหว่างจุดจีโอเดติกดั้งเดิม |
ระหว่างจุดกำเนิดและจุดโหนด (หรือระหว่างจุดโหนด) |
พื้นที่ที่สร้างขึ้น พื้นที่เปิดโล่ง ในพื้นที่ที่ยังไม่ได้รับการพัฒนา |
พื้นที่ที่ยังไม่ได้รับการพัฒนาปกคลุมด้วยไม้และไม้พุ่ม |
เมื่อใช้เครื่องวัดระยะแบบใช้แสงและเครื่องวัดวามเร็วแบบอิเล็กทรอนิกส์ในการวัดด้านข้างของการสำรวจด้วยกล้องสำรวจ สามารถเพิ่มความยาวระยะชักสูงสุดได้ 1.3 เท่า ในขณะที่ไม่ได้กำหนดความยาวสูงสุดของด้านการสำรวจ และจำนวนด้านในการเคลื่อนที่ไม่ควรเกิน : เมื่อถ่ายภาพที่สเกล 1:5000 และ 1 :2000 ในพื้นที่เปิด - 50 และในพื้นที่ปิด - 100 เมื่อถ่ายภาพในระดับ 1:1000 - 40 และ 80 ตามลักษณะของภูมิประเทศและเมื่อถ่ายภาพในระดับ 1:500 - 20 ความยาวสูงสุดของกล้องสำรวจสำรวจและความคลาดเคลื่อนสัมบูรณ์สูงสุดสำหรับการสำรวจในระดับหนึ่ง 1:200 ได้รับการจัดตั้งขึ้นในโครงการสำรวจ
เหตุผลของการสำรวจที่วางแผนไว้ยังสามารถสร้างได้ดังนี้:
1) จุดตัดตรงควรทำจากเครือข่ายจีโอเดติกอ้างอิงอย่างน้อยสามจุด เพื่อให้มุมระหว่างทิศทางที่อยู่ติดกันที่จุดที่กำหนดไม่น้อยกว่า 30° และไม่เกิน 150°
2) การผ่าตัดจะต้องดำเนินการอย่างน้อยสี่จุดของเครือข่ายจีโอเดติกอ้างอิง โดยที่จุดที่กำหนดไม่ได้ตั้งอยู่ใกล้วงกลมที่ผ่านจุดเริ่มต้นสามจุด 3) ต้องสร้างเซอริฟแบบรวมโดยการรวมเซอริฟไปข้างหน้าและข้างหลังโดยใช้จุดเริ่มต้นอย่างน้อยสามจุด
ความสูงของจุดเครือข่ายการสำรวจถูกกำหนดโดยการปรับระดับทางเทคนิค (ตรีโกณมิติ) ตามกฎแล้วควรวางหลักสูตรการปรับระดับทางเทคนิคระหว่างเกณฑ์มาตรฐานการปรับระดับระดับ II-IV (เครื่องหมาย) ในรูปแบบของหลักสูตรแยกหรือระบบของหลักสูตร (รูปหลายเหลี่ยม) อนุญาตให้ใช้ข้อความปรับระดับทางเทคนิคแบบปิดโดยอิงตามเกณฑ์มาตรฐานเริ่มต้นเดียว (เส้นทางที่วางในทิศทางไปข้างหน้าและย้อนกลับ) เมื่อสร้างเครือข่ายการสำรวจระดับความสูง หากไม่มีเกณฑ์มาตรฐานและเครื่องหมายของเครือข่ายระดับรัฐที่ไซต์สำรวจทางวิศวกรรม เส้นทางการปรับระดับทางเทคนิคจะต้องได้รับการรักษาความปลอดภัยด้วยป้ายปรับระดับในอัตราอย่างน้อยสองตัวต่อไซต์งาน และอย่างน้อย 3 กิโลเมตรจากกัน ความยาวที่อนุญาตของจังหวะปรับระดับทางเทคนิค ขึ้นอยู่กับความสูงภาคตัดขวางของการสำรวจภูมิประเทศ ควรเป็นไปตามตารางที่ 4
ตารางที่ 4
ความยาวที่อนุญาตของจังหวะการปรับระดับทางเทคนิค
การปรับระดับทางเทคนิค (รูปที่ 8) ควรดำเนินการโดยใช้ระดับ (ประเภท 3N-5L, 2N-10KL หรือระดับที่เทียบเท่า) เช่นเดียวกับกล้องสำรวจที่มีตัวชดเชย (ประเภท T15MKP เป็นต้น) หรือระดับท่อ โดยมีการอ่านตรงกลาง ด้ายทั้งสองด้านของไม้เท้า

รูปที่ 4 การปรับระดับทางเทคนิค
ความคลาดเคลื่อนระหว่างค่าระดับความสูงที่ได้รับที่สถานีทั้งสองด้านของแผ่นไม่ควรเกิน 5 มม. ระยะทางจากเครื่องมือไปยังสถานที่ติดตั้งแผ่นระแนงควรเท่ากันที่สุดเท่าที่จะเป็นไปได้และไม่เกิน 150 ม. ความคลาดเคลื่อนระหว่างเส้นทางการปรับระดับทางเทคนิคหรือพื้นที่ทดสอบไม่ควรเกินมม. โดยที่ L คือความยาวของระยะชัก, กม. เมื่อจำนวนสถานีต่อสนาม 1 กม. มากกว่า 25 สถานี ความคลาดเคลื่อนระหว่างสนามปรับระดับหรือพื้นที่ทดสอบไม่ควรเกิน มม. โดยที่ n คือจำนวนสถานีในสนาม
การปรับระดับตรีโกณมิติควรใช้เพื่อกำหนดความสูงของจุดของเครือข่าย geodetic การสำรวจในระหว่างการสำรวจภูมิประเทศด้วยความสูงของส่วนบรรเทาทุกๆ 2 และ 5 เมตรและบนภูมิประเทศที่เป็นเนินเขาและขรุขระ - ทุกๆ 1 เมตร จุดเริ่มต้นสำหรับการปรับระดับตรีโกณมิติควรเป็นจุดที่ความสูงถูกกำหนดโดยวิธีการปรับระดับทางเรขาคณิต ในพื้นที่ภูเขาอนุญาตให้ใช้เป็นจุดเริ่มต้นสำหรับเครือข่าย geodetic ของรัฐหรืออ้างอิงซึ่งความสูงจะถูกกำหนดโดยการปรับระดับตรีโกณมิติตามข้อกำหนด ความยาวของข้อความปรับระดับตรีโกณมิติไม่ควรเกิน 2, 6 และ 12 กม. สำหรับการสำรวจภูมิประเทศที่มีความสูงของส่วนนูน 1, 2 และ 5 ม. ตามลำดับ
การปรับระดับตรีโกณมิติของจุดเครือข่ายการสำรวจควรดำเนินการในทิศทางไปข้างหน้าหรือย้อนกลับ โดยการวัดมุมแนวตั้งด้วยกล้องสำรวจตามแนวเส้นตรงกลางในขั้นตอนเดียวที่ตำแหน่งของวงกลมแนวตั้งสองตำแหน่ง อนุญาตให้ใช้จังหวะแขวนของการปรับระดับตรีโกณมิติตามความยาว โดยการวัดมุมแนวตั้งในทิศทางเดียวตามสามเธรดที่ตำแหน่งสองตำแหน่งของวงกลมแนวตั้ง ความผันผวนของ “จุดศูนย์” ที่สถานีไม่ควรเกิน 1 ความสูงของเครื่องมือและเป้าหมายการมองเห็นควรวัดด้วยความแม่นยำ 1 ซม.
ความคลาดเคลื่อนระหว่างระดับความสูงตรงและย้อนกลับสำหรับเส้นเดียวกันในระหว่างการปรับระดับตรีโกณมิติไม่ควรเกิน 0.04S, m โดยที่ S คือความยาวของเส้นซึ่งแสดงเป็นร้อยเมตร ความคลาดเคลื่อนที่อนุญาตในข้อความและรูปหลายเหลี่ยมปิดของการปรับระดับตรีโกณมิติไม่ควรเกินค่าต่อไปนี้:
โดยที่ S คือความยาวของเส้นขีดมีหน่วยเป็นเมตร และ n คือจำนวนเส้นในเส้นขีดหรือรูปหลายเหลี่ยม
1.3 การพัฒนาเหตุผลในการสำรวจและการสำรวจสถานการณ์และภูมิประเทศโดยใช้ระบบดาวเทียมนำทางทั่วโลก
เหตุผลในการถ่ายทำ
6.1. บทบัญญัติทั่วไป
6.1.1. เหตุผลในการสำรวจถูกสร้างขึ้นโดยมีจุดประสงค์เพื่อย่อแผนและพื้นฐานระดับความสูงให้มีความหนาแน่นเพื่อให้แน่ใจว่าสถานการณ์และการบรรเทาทุกข์สามารถสำรวจได้โดยใช้วิธีใดวิธีหนึ่ง
ความหนาแน่นและตำแหน่งของจุดเหตุผลในการสำรวจถูกกำหนดไว้ในการออกแบบทางเทคนิค ขึ้นอยู่กับวิธีการสำรวจสถานการณ์และภูมิประเทศที่เลือก
ด้วยวิธีการสำรวจสามมิติ ตำแหน่งของจุดเหตุผลในการสำรวจจะถูกกำหนดโดยเทคโนโลยีการสำรวจที่เลือก ความสูงของการถ่ายภาพ และขนาดของการถ่ายภาพทางอากาศ
6.1.2. เหตุผลในการสำรวจได้รับการพัฒนาจากจุดของเครือข่าย geodetic ของรัฐ เครือข่าย geodetic ของการควบแน่น 1 และ 2 หมวดหมู่ และการปรับระดับทางเทคนิค
พิกัดที่วางแผนไว้และความสูงของจุดเหตุผลในการสำรวจโดยใช้ระบบดาวเทียมนำทางทั่วโลกถูกกำหนดโดยการสร้างเครือข่ายการสำรวจหรือวิธีจุดแขวน
6.1.3. ข้อผิดพลาดสูงสุดในตำแหน่งของจุดเหตุผลในการสำรวจที่วางแผนไว้ รวมถึงเครื่องหมายระบุที่วางแผนไว้ สัมพันธ์กับจุดของเครือข่าย geodetic ของรัฐไม่ควรเกิน 0.2 มม. ในพื้นที่เปิดและในพื้นที่ที่สร้างขึ้นตามขนาดของแผนที่หรือแผนและ 0.3 มม. สำหรับการสำรวจขนาดใหญ่บนพื้นดินที่ปิดด้วยต้นไม้และพุ่มไม้
6.1.4. จุดเหตุผลในการสำรวจได้รับการแก้ไขบนพื้นโดยมีสัญญาณระยะยาวในลักษณะที่แท็บเล็ตการสำรวจแต่ละแผ่นตามกฎจะมีอย่างน้อยสามคะแนนเมื่อทำการสำรวจในระดับ 1:5000 และสองคะแนนเมื่อทำการสำรวจในระดับ 1 :2000 รวมถึงจุดของเครือข่ายจีโอเดติกของรัฐและเครือข่ายการควบแน่น (ถ้า ข้อกำหนดทางเทคนิคการออกแบบทางเทคนิคของลูกค้าไม่ต้องการความหนาแน่นของการยึดที่มากขึ้น) กำหนดความหนาแน่นของการแก้ไขจุดเหตุผลในการสำรวจเมื่อถ่ายภาพที่มาตราส่วน 1:1000 และ 1:500 โครงการด้านเทคนิค.
บนอาณาเขต การตั้งถิ่นฐานและไซต์งานอุตสาหกรรม จุดเหตุผลในการสำรวจทั้งหมด (รวมถึงเครื่องหมายระดับความสูงของแผน) มีป้ายยึดระยะยาว
ประเภทของสัญญาณระยะยาวและชั่วคราวแสดงอยู่ในภาคผนวก 4
6.2. แนวทางการออกแบบเหตุผลในการสำรวจ
การออกแบบเหตุผลในการสำรวจจะต้องดำเนินการโดยคำนึงถึงข้อกำหนดของคำแนะนำเหล่านี้ ขึ้นอยู่กับขนาดและวิธีการของการสำรวจที่กำลังจะมีขึ้น ในกรณีนี้ต้องคำนึงถึงข้อกำหนดพิเศษสำหรับเครือข่ายการออกแบบทางภูมิศาสตร์และองค์กรอื่น ๆ ด้วย พื้นฐานสำหรับการออกแบบควรเป็น: การรวบรวมและการวิเคราะห์ข้อมูลและวัสดุเกี่ยวกับงานจีโอเดติกที่เสร็จสมบูรณ์ก่อนหน้านี้ทั้งหมดที่ไซต์สำรวจ ศึกษาพื้นที่ของงานที่จะเกิดขึ้นโดยใช้แผนที่ที่มีขนาดและแหล่งวรรณกรรมที่ใหญ่ที่สุด การศึกษาวัสดุที่ดำเนินการ
การสำรวจพิเศษในพื้นที่ทำงาน รวมถึงการสำรวจและค้นหาเครื่องมือเพื่อหาสัญญาณทางภูมิศาสตร์ของงานที่เสร็จสมบูรณ์ก่อนหน้านี้ การเลือกตัวเลือกที่เหมาะสมที่สุดสำหรับการพัฒนาโครงสร้างทางภูมิศาสตร์โดยคำนึงถึงโอกาสในการพัฒนาดินแดน
ตามกฎแล้วส่วนกราฟิกของโครงการเหตุผลในการสำรวจจะถูกรวบรวมบนแผนที่ที่มีมาตราส่วน 1:50000 - เมื่อออกแบบการสำรวจในระดับ 1:10000 และบนแผนที่ที่มีมาตราส่วน 1:10000 และ 1: 25,000 - เมื่อออกแบบแบบสำรวจขนาดใหญ่
6.2.1. ในระหว่างงานออกแบบจำเป็นต้องดำเนินการ ข้อกำหนดทั่วไปสำหรับการออกแบบที่กำหนดไว้ในส่วนที่ 4 ข้อกำหนดเฉพาะจำนวนหนึ่งต่อไปนี้ที่เกี่ยวข้องกับการใช้อุปกรณ์ดาวเทียมเพื่อสร้างเหตุผลในการสำรวจ:
6.2.1.1. กำหนดประเภทและลักษณะการทำงานของอุปกรณ์ดาวเทียมที่ควรใช้สำหรับการทำงานตามคำแนะนำที่ให้ไว้ในส่วนย่อย 5.2 และ 5.6
6.2.1.2. ตามขนาดของการสำรวจที่กำหนดและความสูงของส่วนบรรเทา ให้เลือกวิธีการกำหนดดาวเทียมและวิธีการพัฒนาเหตุผลในการสำรวจ ตามคำแนะนำที่ให้ไว้ในหัวข้อย่อย 5.5 และในย่อหน้า 6.2.5-6.2.7
6.2.1.3. ขึ้นอยู่กับวัสดุของการศึกษาภูมิประเทศและภูมิศาสตร์ของวัตถุงาน เลือกจุดของพื้นฐานทางภูมิศาสตร์สำหรับการพัฒนาเหตุผลในการสำรวจตามข้อกำหนดของข้อ 6.2.2, 6.2.4
6.2.1.4. จัดทำร่างเหตุผลในการสำรวจตามข้อกำหนดของหัวข้อย่อย 6.1 และข้อ 6.2.3 ซึ่งเป็นไปตามข้อกำหนดสำหรับการส่งผ่านสัญญาณวิทยุที่ไม่มีสิ่งกีดขวางและกันเสียงรบกวนตามคำแนะนำที่ให้ไว้ในหัวข้อย่อย 5.3
6.2.1.5. เตรียมโปรแกรมงานสำหรับงานภาคสนามเพื่อพัฒนาเหตุผลในการสำรวจโดยใช้เทคโนโลยีดาวเทียมตามคำแนะนำทั่วไปที่ให้ไว้ในข้อ 6.2.8 และคำแนะนำในข้อ 6.2.9, 6.2.10 หากมีการวางแผนการพัฒนาเหตุผลในการสำรวจโดยใช้ วิธีสร้างเครือข่ายหรือตามข้อ 6.2.11 หากมีการวางแผนการพัฒนาเหตุผลในการสำรวจโดยวิธีกำหนดจุดแขวน
6.2.1.6. ชี้แจงแผนงานสำหรับงานภาคสนามตามผลการลาดตระเวน (ดูหัวข้อย่อย 6.3)
6.2.1.7. วางแผนตรวจสอบความพร้อมของอุปกรณ์และนักแสดงในการทำงานที่ไซต์งานตามคำแนะนำที่ให้ไว้ในหัวข้อย่อย 5.7
6.2.1.8. ให้คำแนะนำทั่วไปสำหรับการดำเนินการกำหนดดาวเทียมตามส่วนย่อย 5.9
6.2.1.9. แผนการดำเนินการประมวลผลผลการสังเกตดาวเทียมตามคำแนะนำในข้อ 6.2.12
6.2.2. พื้นฐานทางภูมิศาสตร์ที่ใช้สำหรับการพัฒนาเหตุผลในการสำรวจและการสำรวจสถานการณ์และการบรรเทาทุกข์ผ่านคำจำกัดความของดาวเทียมจะต้องเป็นไปตามข้อกำหนดสำหรับการส่งผ่านสัญญาณวิทยุที่ไม่มีสิ่งกีดขวางและกันเสียงรบกวนตามคำแนะนำที่ให้ไว้ในหัวข้อย่อย 5.3
6.2.3. หากไซต์ควรจะสำรวจสถานการณ์และการบรรเทาทุกข์โดยใช้เทคโนโลยีดาวเทียม การสร้างเครือข่ายการควบแน่นทางภูมิศาสตร์ เหตุผลในการสำรวจ และการควบแน่นนั้นไม่จำเป็น เนื่องจากวิธีการกำหนดระยะและความแม่นยำของดาวเทียมเป็นพื้นฐานช่วยให้มั่นใจได้ถึงความเป็นไปได้ในการดำเนินงานสำรวจ โดยตรงบนพื้นฐานของ geodetic ของรัฐ
โครงข่ายปรับระดับที่มีความหนาแน่นตามข้อ 2.22 ในเวลาเดียวกัน ณ จุดของเครือข่ายนี้ไม่ควรมีปัจจัยใดที่ลดความแม่นยำในการกำหนดดาวเทียมที่อธิบายไว้ในย่อหน้า 5.3.4-5.3.6
6.2.4. เนื่องจากจุดเริ่มต้นที่มีการพัฒนาเหตุผลในการสำรวจ (ต่อไปนี้จะเรียกว่าจุดเริ่มต้น) ควรใช้จุดพื้นฐานทางภูมิศาสตร์ทั้งหมดที่ตั้งอยู่ภายในวัตถุและใกล้กับวัตถุที่อยู่นอกขอบเขตมากที่สุด แต่อย่างน้อย 4 จุดที่มีพิกัดแผนที่ทราบ และอย่างน้อย 5 จุดที่มีความสูงที่ทราบ เพื่อให้มั่นใจว่าเหตุผลในการสำรวจถูกนำเข้าสู่ระบบพิกัดและความสูงของจุดบนพื้นฐานภูมิสารสนเทศ
6.2.5. เพื่อพัฒนาเหตุผลในการสำรวจโดยใช้เทคโนโลยีดาวเทียม ขึ้นอยู่กับขนาดการสำรวจที่คาดการณ์ไว้และความสูงของส่วนบรรเทา ควรใช้วิธีใดวิธีหนึ่งจากสองวิธี - วิธีสร้างเครือข่ายหรือวิธีการกำหนดจุดแขวน
6.2.6. เมื่อออกแบบเหตุผลในการถ่ายภาพสำหรับการถ่ายภาพวัตถุเฉพาะ
ในระดับที่ต้องการพร้อมความสูงที่กำหนดของส่วนบรรเทา จำเป็นต้องเลือกวิธีการกำหนดด้วยดาวเทียม - วิธีคงที่ คงที่เร็ว หรือยึดคืน (ดูหัวข้อย่อย 5.5)
6.2.7. คำแนะนำในการเลือกวิธีในการพัฒนาเหตุผลในการสำรวจและวิธีการกำหนดดาวเทียม ขึ้นอยู่กับขนาดการสำรวจและความสูงของส่วนบรรเทามีอยู่ในตารางที่ 6
ตารางที่ 6
| มาตราส่วน | เหตุผลในการวางแผน | ความสูงตามแผนหรืออาคารสูง |
||
| การถ่ายทำ; | เหตุผล |
|||
| ความสูง | ||||
| ส่วนต่างๆ | ||||
| การบรรเทา | ||||
| วิธีการพัฒนา | วิธี | วิธีการพัฒนา | วิธี |
|
| กำลังถ่ายทำ | ดาวเทียม | กำลังถ่ายทำ | ดาวเทียม |
|
| ให้เหตุผลด้วย | คำจำกัดความ | ให้เหตุผลด้วย | คำจำกัดความ |
|
| โดยใช้ | โดยใช้ | |||
| ดาวเทียม | ดาวเทียม | |||
| เทคโนโลยี | เทคโนโลยี | |||
| 1:10000, | คำนิยาม | เร็ว | การสร้างเครือข่าย | เร็ว |
| 1:5000; | จุดแขวน | คงที่ | คงที่ |
|
| 1 ม | หรือ | หรือ |
||
| อาชีพใหม่ | อาชีพใหม่ |
|||
| 1:2000, | การสร้างเครือข่าย | เร็ว | การสร้างเครือข่าย | เร็ว |
| 1:1000, | คงที่ | คงที่ |
||
| 1:500; | หรือ | หรือ |
||
| 1 ม. หรือมากกว่า | อาชีพใหม่ | อาชีพใหม่ |
||
| 1:5000; | คำนิยาม | เร็ว | การสร้างเครือข่าย | คงที่ |
| 0.5 ม | จุดแขวน | คงที่ | ||
| หรือ | ||||
| อาชีพใหม่ | ||||
| 1:2000, | การสร้างเครือข่าย | เร็ว | การสร้างเครือข่าย | คงที่ |
| 1:1000, | คงที่ | |||
| 1:500; | หรือ | |||
| 0.5 ม | อาชีพใหม่ | |||
6.2.7.1. แนะนำให้ใช้วิธีการพัฒนาเหตุผลในการสำรวจโดยการระบุจุดแขวนเมื่อเตรียมพื้นฐาน geodetic สำหรับการสำรวจในขนาดที่ค่อนข้างเล็กโดยมีความสูงหน้าตัดนูน 1 ม., 2 ม. หรือมากกว่า นั่นคือ ในกรณีที่มีความแม่นยำสูง ไม่จำเป็นต้องใช้วัสดุ
6.2.7.2. แนะนำให้ใช้วิธีการพัฒนาเหตุผลในการสำรวจโดยการสร้างเครือข่ายเพื่อให้ได้พิกัดแผนที่แม่นยำที่สุดและความสูงของจุดที่จำเป็นสำหรับการสำรวจในระดับที่ใหญ่ที่สุดโดยมีค่าการควบคุมทั้งหมด (ดูข้อ 2.11.1) ของความสูงของ ส่วนบรรเทา (จาก 0.5 ม. ถึง 5 ม.)
6.2.7.3. วิธีการกำหนดดาวเทียมแบบคงที่อย่างรวดเร็วในการผลิตงานในการพัฒนาเหตุผลในการสำรวจเป็นวิธีหลัก ช่วยให้คุณสามารถกำหนดพิกัดที่วางแผนไว้ของจุดและความสูงของจุดเหล่านั้นด้วยความแม่นยำเพียงพอและมีประสิทธิภาพสูงสำหรับช่วงสเกลและระดับความสูงส่วนใหญ่ของส่วนนูน
6.2.7.4. วิธีการยึดครองใหม่จะเข้ามาแทนที่วิธีแบบคงที่อย่างรวดเร็ว ในกรณีที่ตามเงื่อนไขการทำงาน จะเป็นประโยชน์ที่จะดำเนินการรับสัญญาณดาวเทียมระยะสั้นสองครั้ง โดยแยกจากกันตามเวลา แทนที่จะเป็นการรับระยะยาวเพียงครั้งเดียว
6.2.7.5. วิธีการกำหนดดาวเทียมแบบคงที่ เนื่องจากประสิทธิภาพการทำงานค่อนข้างต่ำ สามารถใช้ในกรณีที่ด้วยความสูงภาคตัดขวางที่ 0.5 ม. มีความเป็นไปได้ในทางเทคนิคและทางเศรษฐกิจที่จะดำเนินการกำหนดด้วยดาวเทียม แทนที่จะทำการปรับระดับเพื่อ ได้รับฐานสำรวจที่สูง
6.2.8. แผนงานภาคสนามสำหรับการพัฒนาเหตุผลในการสำรวจโดยใช้เทคโนโลยีดาวเทียมควรเป็นไปตามรายการ
เซสชัน ซึ่งแต่ละเซสชันจะมีเทคนิคที่ทำ ณ จุดของวัตถุงาน
โปรแกรมการทำงานภาคสนามควรมีข้อมูลต่อไปนี้:
6.2.8.1. ชื่อของวัตถุงาน
6.2.8.2. ประเภทของเหตุผลในการสำรวจที่กำลังพัฒนา (แบบวางแผน อาคารสูง หรือแผนสูง)
6.2.8.3. ขนาดและความสูงของส่วนนูนของงานสำรวจที่คาดการณ์ไว้
6.2.8.4. รายการอุปกรณ์และซอฟต์แวร์ที่ใช้
6.2.8.5. วิธีการประยุกต์ในการกำหนดดาวเทียม
6.2.8.6. ค่าระยะเวลาการรับสำหรับวิธีการกำหนดดาวเทียมที่วางแผนไว้สำหรับการใช้งานและจำนวนดาวเทียมที่สังเกตได้ต่างๆ (ดูย่อหน้าที่ 5.5.3)
6.2.8.7. ค่าของช่วงเวลาการบันทึกข้อมูลการสังเกตดาวเทียมสำหรับวิธีการกำหนดดาวเทียมที่วางแผนไว้สำหรับการใช้งาน
6.2.8.8. คำแนะนำสำหรับขั้นตอนการดำเนินงานภาคสนามที่ไซต์งานโดยใช้วิธีกำหนดดาวเทียม (อธิบายไว้ในหัวข้อย่อย 5.5) รวมถึง:
หมายเลขเซสชัน
จำนวนเครื่องรับที่ใช้ในจุดใดจุดหนึ่งของเกณฑ์ทางภูมิศาสตร์หรือเหตุผลในการสำรวจเพื่อทำการรับสัญญาณ โดยระบุชื่อของจุดเหล่านี้และทำเครื่องหมายจำนวนเครื่องรับที่ได้รับในเซสชันเป็นสถานีฐาน
วิธีการกำหนดดาวเทียมที่ใช้ในการดำเนินการบางเซสชัน
ตัวอย่างของการออกแบบโปรแกรมงานสำหรับงานภาคสนามแสดงไว้ในภาคผนวก 5 คอลัมน์ "วันที่และช่วงเวลาที่พารามิเตอร์การกำหนดค่าของกลุ่มดาวดาวเทียมเหมาะสมที่สุดสำหรับการกำหนดดาวเทียม" ของตาราง 5.2 ของภาคผนวกนี้ถูกกรอก อยู่ในขั้นตอนการเตรียมงานภาคสนาม (ดูหัวข้อย่อย 6.4)
6.2.9. เมื่อออกแบบการพัฒนาเหตุผลในการสำรวจโดยใช้วิธีสร้างเครือข่าย จะต้องร่างโปรแกรมงานภาคสนามที่ไซต์งานเพื่อให้สายเครือข่ายทั้งหมดถูกกำหนดอย่างเป็นอิสระจากกัน รวมถึงสายตามจุดของพื้นฐานทางภูมิศาสตร์ ในกรณีนี้ จำเป็นต้องออกแบบคำจำกัดความของเส้นจากแต่ละจุดที่กำหนดใหม่ของเหตุผลในการสำรวจให้เหลืออย่างน้อย 3 จุด ตัวอย่างของโครงการพัฒนาเหตุผลในการสำรวจโดยใช้วิธีสร้างเครือข่ายแสดงในรูปที่ 1
จุดฐานจีโอเดติกในระดับความสูง
จุดของพื้นฐานทางภูมิศาสตร์ที่วางแผนไว้
รูปที่ 1. ตัวอย่างโครงการพัฒนาเหตุผลในการสำรวจโดยใช้วิธีสร้างเครือข่าย
6.2.10. ในกรณีการออกแบบการใช้เครื่องรับ 2 เครื่องในการสังเกตดาวเทียม การทำตามคำแนะนำในข้อ 6.2.9 ไม่ก่อให้เกิดปัญหาใดๆ อย่างไรก็ตาม หากไซต์วางแผนที่จะใช้เครื่องรับมากกว่า 2 เครื่อง และงานได้รับการวางแผนให้ดำเนินการในเซสชันที่มีการสังเกตการณ์ตั้งแต่ 3 จุดขึ้นไป เมื่อจัดทำโปรแกรมงานภาคสนาม จำเป็นต้องร่างโครงร่างสำหรับแต่ละเซสชัน เส้นดังกล่าวเป็นเส้นที่กำหนดโดยอิสระ เส้นขาดจากจุดเชื่อมต่อซึ่งไม่ตัดกันเอง ณ จุดที่เส้นเชื่อมต่อกันและไม่ปิด
ตามตัวอย่าง รูปที่ 2 แสดงไดอะแกรมที่แสดงโปรเจ็กต์สำหรับการกำหนด 3 บรรทัดอย่างอิสระจากเซสชันที่ดำเนินการที่ 4 จุด ดังที่เห็นในรูปที่ 2 เส้นขาดที่ประกอบด้วยเส้น 1-2, 2-3, 3-4 จะไม่ตัดกันที่จุดที่เส้นเชื่อมต่อกันและไม่ปิด หากต้องการกำหนดบรรทัด 1-3, 1-4, 2-4 อย่างอิสระ จำเป็นต้องดำเนินการเซสชันอื่นที่จุดเหล่านี้ ดังที่เห็นในรูป ในกรณีนี้ เส้นขาดจากการเชื่อมต่อของเส้นเหล่านี้ไม่ได้ตัดกันเองที่จุดเชื่อมต่อของเส้นและไม่ปิด

การวัดที่เป็นอิสระ
การวัดขึ้นอยู่กับ
รูปที่ 2. แผนภาพแสดงโครงการกำหนด 3 บรรทัดอย่างอิสระจากเซสชัน
ทำได้ 4 คะแนน
6.2.11. เมื่อวางแผนการพัฒนาเหตุผลในการสำรวจโดยใช้วิธีการกำหนดจุดแขวน จำเป็นต้องออกแบบคำจำกัดความของเส้นจากแต่ละจุดของเหตุผลในการสำรวจไปยังจุดที่ใกล้ที่สุดของพื้นฐาน geodetic ตลอดจนระหว่างจุดที่อยู่ติดกันของ geodetic พื้นฐาน (ดังแสดงในรูปที่ 3a) หรือหากใช้งานได้จริง จำเป็นต้องออกแบบการกำหนดเส้นจากจุดเหตุผลในการสำรวจไปยังจุดที่ใกล้ที่สุดหลายจุดของพื้นฐานทางภูมิศาสตร์ (รูปที่ 3b, c) จึงได้เซอริฟ ในทุกกรณี การก่อสร้างจีโอเดติกจะต้องรวมอยู่ด้วย ปริมาณที่ต้องการจุดของพื้นฐานทางภูมิศาสตร์ (ดูย่อหน้าที่ 6.2.4)

จุดฐานจีโอเดติก
- จุดเหตุผลในการถ่ายภาพ
รูปที่ 3 แบบแผนแสดงโครงการพัฒนาเหตุผลในการสำรวจโดยใช้วิธีการกำหนดจุดแขวน
6.2.12. เมื่อออกแบบการประมวลผลทางคอมพิวเตอร์ของผลการสังเกตดาวเทียม จะมีการใช้คอมพิวเตอร์ที่เข้ากันได้กับ IBM และการใช้ชุดซอฟต์แวร์พิเศษที่รวมอยู่ในชุดอุปกรณ์ดาวเทียมที่วางแผนไว้สำหรับการใช้งาน การทำงานกับแพ็คเกจเหล่านี้จะต้องได้รับการออกแบบตามข้อกำหนดสำหรับการใช้งานที่กำหนดไว้ในเอกสารประกอบการปฏิบัติงานที่แนบมาด้วย ต้องระบุประเภทของซอฟต์แวร์ไว้ใน โปรแกรมการทำงานงานภาคสนาม (ดูตัวอย่างภาคผนวก 5)
6.3. การลาดตระเวนและการรักษาจุดของเหตุผลในการสำรวจที่สร้างขึ้น
โดยใช้เทคโนโลยีดาวเทียม
6.3.1. การลาดตระเวนและการกำหนดจุดเหตุผลในการสำรวจบนพื้นจะดำเนินการตามคำแนะนำในส่วนที่ 6 ของคำแนะนำ ในเวลาเดียวกันเมื่อคำนึงถึงคุณสมบัติของเทคโนโลยีดาวเทียมแล้ว งานต่อไปนี้จะได้รับการแก้ไขในกระบวนการลาดตระเวนด้วย:
6.3.1.1. พวกเขาตรวจสอบจุดต่างๆ ของฐานจีโอเดติกและกำหนดความเหมาะสมที่แท้จริงในการสังเกตการณ์ด้วยดาวเทียม รายการที่ไม่เหมาะสมสำหรับการทำงานจะต้องถูกปฏิเสธ หากจำนวนจุดฐานจีโอเดติกที่มีอยู่ในไซต์ที่เหมาะสมสำหรับการสังเกตการณ์ด้วยดาวเทียมนั้นมีจำกัด จะมีการกำหนดมาตรการเพื่อให้แน่ใจว่ามีความเป็นไปได้ในการสังเกตการณ์ที่จุดเหล่านี้ (การยกเสาอากาศรับสัญญาณ การวางจุดติดตั้งเสาอากาศตามคำจำกัดความขององค์ประกอบการจัดตำแหน่ง)
6.3.1.2. ตรวจสอบความเป็นไปได้ในการดำเนินการกำหนดดาวเทียมที่จุดเหตุผลในการสำรวจ ในกรณีนี้ จะต้องระบุพื้นที่ที่อาจมีสิ่งกีดขวาง การบิดเบือน และการรบกวนทางวิทยุ (ดูหัวข้อย่อย 5.3) และต้องปรับตำแหน่งของจุดที่วางแผนไว้ก่อนหน้านี้ในกระบวนการออกแบบ ชี้แจงคำอธิบายตำแหน่งของจุดต่างๆ
6.3.1.3. หากจำเป็น ซึ่งเป็นผลมาจากการตรวจสอบจุดเหตุผลในการสำรวจ งานเตรียมการต่อไปนี้จะดำเนินการ:
เลือกจุดเหตุผลในการสำรวจใหม่เพื่อทดแทนจุดที่ไม่เหมาะสมสำหรับการกำหนดดาวเทียม
ทำการเปลี่ยนแปลงคำอธิบายตำแหน่งของจุดต่างๆ
6.3.2. ในระหว่างกระบวนการลาดตระเวน จำเป็นต้องเก็บบันทึกซึ่งแต่ละจุดจะต้องบันทึกมุมราบและความสูงของขอบเขตสิ่งกีดขวาง หากความสูงของสิ่งกีดขวางเหนือขอบฟ้ามากกว่า 15° ในกรณีนี้ ควรกำหนดความสูงของสิ่งกีดขวางเหนือขอบฟ้าโดยคำนึงถึงความสูงที่เป็นไปได้ของเสาอากาศรับสัญญาณ
6.3.3. จุดเหตุผลในการสำรวจจะต้องได้รับการแก้ไขบนพื้นโดยมีป้ายที่รับประกันความปลอดภัยของจุดในระยะยาวและป้ายชั่วคราวโดยคาดหวังว่าจะรักษาจุดไว้ในระหว่างการสำรวจ (ดูภาคผนวก 4)
6.3.4. เมื่อแก้ไขประเด็นเหตุผลในการสำรวจด้วยสัญญาณระยะยาว ควรปฏิบัติตามสิ่งต่อไปนี้
6.3.4.1. สิ่งต่อไปนี้ใช้เป็นสัญญาณระยะยาว:
เสาคอนกรีต (รูปที่ 4.1a) ขนาด 12x12x90 ซม. ที่ปลายด้านบนซึ่งฝังตะปูปลอมแปลงและในส่วนล่างเพื่อการยึดกับพื้นได้ดีขึ้นหมุดโลหะสองตัวจะถูกยึดเข้าด้วยกัน
เสาหินคอนกรีต (รูปที่ 4.1b) ในรูปแบบของปิรามิดจัตุรมุขที่ถูกตัดทอนโดยมีฐานล่าง 15x15 ซม. ฐานบน 10x10 ซม. และสูง 90 ซม. โดยมีตะปูปลอมแปลงฝังอยู่ในนั้น
ท่อเหล็ก (รูปที่ 4.1c) ที่มีเส้นผ่านศูนย์กลาง 35-60 มม. รางหรือโครงเหล็กฉาก 50x50x5 มม. (หรือ 35x35x4 มม.) ยาว 100 ซม. มีพุกคอนกรีตเสริมเหล็กที่ด้านล่างและมีแผ่นโลหะสำหรับจารึกที่ ด้านบน; สมอทำจากเหล็กเสริมแรงยึดกับท่อ (ราง, มุม) ฝังอยู่ในคอนกรีตในรูปแบบของปิรามิดจัตุรมุขที่ถูกตัดทอนซึ่งมีฐานล่าง 20x20 ซม. ฐานบน 15x15 ซม. และสูง 20 ซม. ;
เสาไม้ (รูปที่ 4.1d) ที่มีเส้นผ่านศูนย์กลางอย่างน้อย 15 ซม. มีไม้กางเขนติดตั้งบนเสาหินคอนกรีตในรูปแบบของปิรามิดจัตุรมุขที่ถูกตัดทอนซึ่งมีฐานด้านล่าง 20x20 ซม. ฐานด้านบน 15x15 ซม. และ ความสูง 20 ซม. ที่ขอบด้านบนของเสาหินจะมีรอยบากรูปกากบาทหรือตะปูฝังอยู่ ส่วนบนของคอลัมน์ถูกตัดลงบนกรวย ด้านล่างของโคนจะมีช่องเจาะสำหรับจารึก
ตอของต้นสนที่ตัดใหม่ (รูปที่ 4.1e) (ใช้ในพื้นที่ป่า) ที่มีเส้นผ่านศูนย์กลางส่วนบนอย่างน้อย 20 ซม. แปรรูปเป็นรูปเสาพร้อมช่องเจาะสำหรับจารึกและชั้นวาง ด้วยตะปูปลอมตอกลงไป
เครื่องหมาย หมุด สลักเกลียว ยึดด้วยปูนซีเมนต์ในโครงสร้างคอนกรีตของโครงสร้างต่าง ๆ พื้นที่ที่มีพื้นผิวแข็งหรือหิน
เสาคอนกรีตและเสาหินขนาดใหญ่ (รูปที่ 4.1a-d) วางลึก 80 ซม.
6.3.4.2. ป้ายประเภทระยะยาวต้องขุดคูน้ำเป็นรูปสี่เหลี่ยมจัตุรัส ด้านข้างกว้าง 1.5 ม. ลึก 0.3 ม. กว้างด้านล่าง 0.2 ม. และด้านบนกว้าง 0.5 ม. ควรทำคันดินสูง 0.10 ม. รอบป้าย ในพื้นที่หนองน้ำ พื้นที่ป่า และดินเยือกแข็งถาวร เขื่อนจะถูกแทนที่ด้วยบ้านไม้ซุง (1.0x1.0x0.3 ม.) ที่เต็มไปด้วยดิน ในกรณีนี้ไม่ได้เจาะป้ายเข้าไป
6.3.4.3. ในทุกกรณี ป้ายระยะยาวจะถูกติดตั้งในสถานที่เพื่อความปลอดภัย ความปลอดภัย และความสะดวกในการใช้งานในระหว่างการสำรวจภูมิประเทศ การสำรวจ และการก่อสร้าง รวมถึงในระหว่างการดำเนินงานในภายหลังของสิ่งอำนวยความสะดวกที่สร้างขึ้น ไม่อนุญาตให้ติดป้ายถาวร ที่ดินทำกินและหนองน้ำ ถนน ใกล้ขอบแม่น้ำที่ถูกกัดเซาะและริมฝั่งอ่างเก็บน้ำและในสถานที่อื่น ๆ ที่อาจเป็นอันตรายต่อความปลอดภัยของป้ายและที่ตัวป้ายอาจเป็นอุปสรรคต่อกิจกรรมทางเศรษฐกิจ
6.3.5. เมื่อได้รับคะแนนเหตุผลในการสำรวจด้วยป้ายชั่วคราว คุณต้องปฏิบัติตามคำแนะนำต่อไปนี้
6.3.5.1. ป้ายชั่วคราวสามารถใช้เป็นตอไม้ (รูปที่ 4.2a) เสาไม้ที่มีเส้นผ่านศูนย์กลาง 5-8 ซม. (รูปที่ 4.2b) เสาไม้ (รูปที่ 4.2c) หรือท่อโลหะ (เหล็กฉาก) ตอกลงดิน สูงขึ้น 0.4 -0.6 ม. โดยติดตั้งป้อมยามไว้ใกล้เคียง (รูปที่ 4.2d) หรือไม้กางเขนทาสีบนก้อนหิน (รูปที่ 4.2d) ป้ายชั่วคราวจะถูกขุดในคูน้ำเป็นวงกลมเส้นผ่านศูนย์กลาง 0.8 ม.
6.3.5.2. ศูนย์กลางของป้ายชั่วคราวระบุด้วยตะปูที่ตอกเข้าไปในส่วนบนของเสา (เสา) หรือโดยรอยบากบนโลหะ ในพื้นที่ป่า เพื่อให้ง่ายต่อการค้นหาป้าย หากจำเป็น ให้ทาสีต้นไม้ด้วย
6.3.6. แต่ละเครื่องหมายของเหตุผลในการสำรวจจะได้รับการกำหนดหมายเลขซีเรียลด้วย
ในลักษณะที่ไม่มีสัญลักษณ์ที่มีตัวเลขเหมือนกันบนวัตถุ
เมื่อรวมสัญญาณของโครงสร้าง geodetic ที่สร้างขึ้นก่อนหน้านี้ไว้ในเหตุผลของการสำรวจ ไม่อนุญาตให้เปลี่ยนจำนวนสัญญาณเหล่านี้
6.3.7. บนป้ายระยะยาวที่ใช้สีน้ำมันและบนป้ายชั่วคราวโดยใช้ดินสอรั้วเขียน: ชื่อย่อขององค์กรที่ดำเนินงานจำนวนจุดที่กำหนด (จุด) และปีที่ติดตั้งป้าย
เมื่อใช้อุปกรณ์ดาวเทียมและชุดซอฟต์แวร์ที่แนบมาเพื่อพัฒนาเหตุผลในการสำรวจขั้นตอนการเตรียมการผลิตงานประกอบด้วยดังต่อไปนี้:
ปฏิบัติตามข้อกำหนดของเอกสารประกอบการปฏิบัติงานเพื่อเตรียมอุปกรณ์สำหรับการปฏิบัติงาน
การตรวจสอบความพร้อมของอุปกรณ์และนักแสดงในการทำงานตามแผนงานของงานภาคสนามที่โครงการจัดให้
ดำเนินการพยากรณ์กลุ่มดาวดาวเทียม
6.4.1. การปฏิบัติตามข้อกำหนดของเอกสารการปฏิบัติงานในการเตรียมอุปกรณ์สำหรับการดำเนินงานในระหว่างการพัฒนาเหตุผลในการสำรวจจะต้องดำเนินการตามคู่มือการใช้งานของอุปกรณ์ (หรือเอกสารแทนที่รวมอยู่ในชุดอุปกรณ์)
6.4.2. เมื่อตรวจสอบความพร้อมของอุปกรณ์และนักแสดงในการทำงานเพื่อพัฒนาเหตุผลในการสำรวจจำเป็นต้องปฏิบัติตามคำแนะนำที่ให้ไว้ในหัวข้อย่อย 5.7
6.4.3. การทำนายกลุ่มดาวดาวเทียมสำหรับการผลิตงานเกี่ยวกับการพัฒนาเหตุผลในการสำรวจควรดำเนินการตามคำแนะนำที่แนบมากับแพ็คเกจซอฟต์แวร์และคำแนะนำที่ให้ไว้ในหัวข้อย่อย 5.8
ตามช่วงเวลาที่ได้รับอันเป็นผลมาจากการคาดการณ์ที่เหมาะสมที่สุดสำหรับการสังเกตดาวเทียมในแต่ละจุดของเหตุผลในการสำรวจ จะพบโซนที่ทับซ้อนกันและกำหนดช่วงเวลาที่เหมาะสมที่สุดสำหรับการดำเนินการเซสชั่นโดยรวม ข้อมูลนี้ในรูปแบบของวันที่ทำงานและเวลาเริ่มต้นและสิ้นสุดของช่วงเวลา (ช่วงเวลา) ในระหว่างที่พารามิเตอร์การกำหนดค่ากลุ่มดาวดาวเทียมเหมาะสมที่สุดสำหรับการพิจารณาดาวเทียมจะถูกป้อนลงในโปรแกรมงานภาคสนาม (สำหรับตัวอย่างบันทึก ดูภาคผนวก 5 ตาราง 5.2)
6.5 ขั้นตอนการปฏิบัติงานภาคสนามและ คำแนะนำทั่วไปในการประมวลผลผลการสังเกตด้วยดาวเทียม
6.5.1. งานภาคสนามเพื่อพัฒนาเหตุผลการสำรวจโดยใช้เทคโนโลยีดาวเทียมควรเริ่มต้นด้วยการเตรียมการที่อธิบายไว้ในหัวข้อย่อย 6.4
6.5.2. งานภาคสนามควรดำเนินการตามการออกแบบทางเทคนิค ซึ่งพัฒนาขึ้นโดยคำนึงถึงคำแนะนำที่ให้ไว้ในหัวข้อย่อย 6.2 ตามแผนงานงานภาคสนาม (ดูข้อ 6.2.8) ปรับปรุงตามผลลัพธ์ของการลาดตระเวน (ดูหัวข้อย่อย 6.3 ). ในกรณีนี้ ต้องใช้ทั้งวิธีการพัฒนาเหตุผลในการสำรวจ (ดูข้อ 6.2.5) ที่โครงการกำหนดไว้ และวิธีการกำหนดดาวเทียมจะต้องได้รับการดำเนินการ: - คงที่อย่างรวดเร็ว วิธีการยึดครองใหม่ หรือคงที่ - ระบุไว้ในโปรแกรมงานภาคสนามสำหรับ บางเซสชัน
6.5.3. งานภาคสนามที่ขยายใหญ่ขึ้นที่ไซต์งานประกอบด้วยการส่งเครื่องรับและอุปกรณ์ไปยังจุดต่างๆ และการแสดงเซสชั่นตามโปรแกรมงานภาคสนาม ในเวลาเดียวกัน เมื่อใช้วิธีการกำหนดดาวเทียมแบบคงที่และแบบคงที่อย่างรวดเร็ว จำเป็นต้องทำการรับสัญญาณหนึ่งครั้งในแต่ละจุด และเมื่อใช้วิธีการ reoccupation - การรับสองครั้งโดยมีช่วงเวลา 1 ถึง 4 ชั่วโมง
6.5.4. ในเซสชันที่จะดำเนินการรับสัญญาณในแต่ละจุด คุณต้องดำเนินการต่อไปนี้* โดยปฏิบัติตามคำแนะนำที่ให้ไว้ในหัวข้อย่อย 5.9 และได้รับคำแนะนำจากเอกสารการปฏิบัติงานประเภทเครื่องรับที่ใช้:
_________________
ควรชี้แจงขั้นตอนในเอกสารประกอบการปฏิบัติงานเกี่ยวกับประเภทของเครื่องรับที่ใช้
6.5.4.1. วางอุปกรณ์ ติดตั้งเครื่องรับ ณ จุดนั้น และกำหนดความสูงของเสาอากาศ
6.5.4.2. เตรียมเครื่องรับสำหรับการใช้งานตามที่ระบุไว้ในเอกสารประกอบการใช้งาน
6.5.4.3. ตั้งค่าโหมดบันทึกข้อมูลการสังเกตดาวเทียม
6.5.4.4. ใช้แป้นพิมพ์เพื่อเข้าสู่อุปกรณ์หน่วยความจำ: ค่าของหมายเลขจุด, ค่าความสูงของเสาอากาศและข้อมูลเสริม: เวลาเริ่มต้นและสิ้นสุดของการรับ, การสูญเสียการสื่อสาร ฯลฯ
6.5.4.5. รับการสังเกตการณ์ดาวเทียมตามเวลาที่ระบุในโปรแกรมงานภาคสนามสำหรับวิธีการกำหนดดาวเทียมที่ใช้
6.5.4.6. ปิดโหมดการบันทึกข้อมูลและปิดอุปกรณ์
6.5.5. เมื่อสิ้นสุดการทำงานที่โรงงาน ควรทำการประมวลผลข้อมูลการสังเกตดาวเทียมด้วยคอมพิวเตอร์
6.5.5.1. การประมวลผลทางคอมพิวเตอร์ดำเนินการในขั้นตอนต่อไปนี้:
1) การประมวลผลล่วงหน้า - การแก้ไขความคลุมเครือของช่วงหลอกของเฟสไปยังดาวเทียมที่สังเกตได้เพื่อรับพิกัดของจุดที่กำหนด
ระบบพิกัดระบบดาวเทียมนำทางทั่วโลกและการประเมินความแม่นยำ
การแปลงพิกัดเป็นระบบพิกัดที่ยอมรับ (ดูข้อ 2.20)
การปรับโครงสร้างจีโอเดติกและการประเมินความแม่นยำ
6.5.5.2. ชุดซอฟต์แวร์ที่มาพร้อมกับอุปกรณ์ดาวเทียมที่ใช้สำหรับงานภาคสนามควรใช้เป็นซอฟต์แวร์สำหรับการประมวลผลทางคอมพิวเตอร์ ตัวอย่างของแพ็คเกจซอฟต์แวร์ที่พบบ่อยที่สุดได้แก่: BL-L1 (Land Surveyor L1), SKI (WILD GPS System200, Leica SR-9400, Leica SR-9500), GPSurvey (Trimble 4000SSE, Trimble 4000SSi), PRISM (Ashtech Z-12) , Ashtech Z-ผู้สำรวจ)
6.5.5.3. ในการคำนวณ คุณต้องใช้คอมพิวเตอร์ที่เข้ากันได้กับ IBM ข้อกำหนดทางเทคนิคซึ่งตรงตามข้อกำหนดที่กำหนดไว้ในเอกสารการปฏิบัติงานที่แนบมากับชุดซอฟต์แวร์
6.5.5.4. เมื่อดำเนินงานด้านการคำนวณ ควรใช้เอกสารการปฏิบัติงานที่แนบมากับชุดซอฟต์แวร์แต่ละชุดเป็นแนวทาง
6.5.5.5. จากการประมวลผลทางคอมพิวเตอร์ ควรรวบรวมรายการพิกัดและความสูงของจุดเหตุผลในการสำรวจ
6.6. การเตรียมเอกสารการรายงานตามผลการสร้างเหตุผลในการสำรวจโดยใช้เทคโนโลยีดาวเทียม
6.6.1. การเตรียมเอกสารการรายงานสำหรับการสร้างเหตุผลในการสำรวจโดยใช้เทคโนโลยีดาวเทียมนั้นดำเนินการโดยมีวัตถุประสงค์เพื่อจัดทำรายงานทางเทคนิคเกี่ยวกับงานที่ดำเนินการที่ไซต์
6.6.2. วัสดุการรายงานจะต้องรวบรวมตามข้อกำหนดของ "คำแนะนำในการจัดทำรายงานทางเทคนิคเกี่ยวกับงานทางภูมิศาสตร์, ดาราศาสตร์, กราวิเมตริกและภูมิประเทศ" ในปัจจุบัน () และ "คำแนะนำเกี่ยวกับขั้นตอนในการดำเนินการกำกับดูแลทางภูมิศาสตร์ของรัฐใน สหพันธรัฐรัสเซีย" ().
6.6.3. สื่อการรายงานจะต้องระบุลักษณะเฉพาะของวิธีการ คุณภาพของงานที่ทำ และคุณลักษณะทั้งหมดของเทคโนโลยีสำหรับการดำเนินการอย่างครบถ้วน
6.6.4. เอกสารการรายงานมีสมุดจดเป็น ส่วนประกอบรายงานทางเทคนิคที่ครอบคลุมเกี่ยวกับสิ่งอำนวยความสะดวกและจัดทำขึ้นตามคำแนะนำ
6.6.5. การรายงานเนื้อหาเกี่ยวกับการสร้างเหตุผลในการสำรวจโดยใช้เทคโนโลยีดาวเทียมจะต้องมี:
ข้อมูลทั่วไป (ชื่อองค์กรและปีที่ดำเนินการ รายการคำแนะนำและข้อบังคับอื่น ๆ ที่เป็นแนวทางในการปฏิบัติงาน สภาพทางกายภาพและทางภูมิศาสตร์และความร่วมมือด้านการบริหารของพื้นที่ทำงาน เนื้อหาและวัตถุประสงค์ของงาน ขนาดและ ภาพตัดขวางของการผ่อนปรนของการสำรวจตามแผน)
ข้อมูลเกี่ยวกับงานภูมิประเทศและภูมิศาสตร์ของปีก่อนหน้า (รายชื่อและปีที่ทำงาน ชื่อองค์กรที่ดำเนินงาน ความถูกต้องและระดับการใช้งาน ความปลอดภัยของจุดภูมิศาสตร์ตามผลการสำรวจ)
คุณลักษณะของพื้นฐานทางภูมิศาสตร์ (ระบบพิกัดและความสูงที่ใช้ ความหนาแน่นของจุด การสร้างป้ายและประเภทของศูนย์กลาง วิธีความแม่นยำและการวัด เครื่องมือ วิธีการปรับแต่ง)
ข้อมูลเกี่ยวกับงานที่ทำ (ความหนาแน่นของเหตุผลในการสำรวจ ลำดับจุดยึด เทคนิคการวัด และความแม่นยำของผลลัพธ์)
nktroE ฉัน ne g m r sh i e ish sh i i u i sh
และ 11.2. เหตุผลในการสำรวจเชิงภูมิศาสตร์
เหตุผลในการสำรวจ geodetic ถูกสร้างขึ้นเพื่อจุดประสงค์ในการเพิ่มความหนา (เช่น เพื่อเพิ่มจำนวนจุด geodetic ต่อหน่วยพื้นที่) ของแผน geodetic และพื้นฐานการยกระดับให้มีความหนาแน่นเพื่อให้แน่ใจว่าการดำเนินการสำรวจภูมิประเทศขนาดใหญ่ (1: 5,000 -1: 500) เหตุผลในการสำรวจพัฒนาจากจุดต่างๆ ของเครือข่ายจีโอเดติกหลักและเครือข่ายการควบแน่นในรูปแบบของกล้องสำรวจ การเคลื่อนที่ผ่านความเร็วรอบ และสามเหลี่ยมไมโคร ความสูงของจุดเครือข่ายการสำรวจถูกกำหนดโดยการปรับระดับทางเรขาคณิตหรือตรีโกณมิติ
การเคลื่อนที่ของกล้องสำรวจเป็นรูปหลายเหลี่ยมแบบปิดหรือแบบเปิด โดยทุกด้านจะวัด dv d2, d n และมุม Pj, Р2г ---г RL ด้านข้างของการเคลื่อนที่ของกล้องสำรวจวัดด้วยกล้องสำรวจระยะแสง เทปวัด (สายวัด) หรือเครื่องค้นหาระยะภาพคู่ มุมแนวนอน - สเกลกล้องสำรวจประเภท 4T30Pidr (รูปที่ 11.1)
จากด้านและมุมที่วัด หลังจากการประมวลผลที่เหมาะสมแล้ว จะได้พิกัดของจุดขวาง นั่นคือการเคลื่อนที่ของกล้องสำรวจจะสร้างจุดเพิ่มเติมด้วยพิกัด X. Y ที่ทราบ
การเคลื่อนที่แบบวัดความเร็วยังเป็นรูปหลายเหลี่ยมแบบปิดหรือแบบเปิดที่ใช้วัดทุกด้าน แนวนอน และแนวตั้ง ด้านข้างของการเคลื่อนที่แบบทาเคโอเมตริกนั้นวัดด้วยตัวค้นหาระยะ (รวมถึงไส้หลอด) มุมแนวตั้งและแนวนอน - ด้วยกล้องสำรวจทางเทคนิคหรือมาตรความเร็ว จากผลของการวางการเคลื่อนที่แบบ tacheometric จะได้รับจุดเพิ่มเติมพร้อมพิกัดที่ทราบ
และส่วนสูง Xg, Y /", N I.
ดังนั้น การเคลื่อนที่ของกล้องสำรวจจะกำหนดตำแหน่งของจุดในแผนเท่านั้น และการเคลื่อนที่ของความเร็วรอบ - ทั้งในแผนและในความสูง
รูปที่ d3 11.1. เปิดปิด
และปิดทำการแล้ว
ขอแนะนำให้ทำให้ด้านข้างของการเคลื่อนไหวเท่ากันโดยประมาณ ความยาวเฉลี่ยของด้านข้างของการเคลื่อนที่แบบวัดความเร็วและกล้องสำรวจคือ 200 - 250 ม. ค่าต่ำสุดคืออย่างน้อย 40 ม. เมื่อวัดความยาวด้วยเครื่องค้นหาระยะ ด้านข้างสามารถเพิ่มเป็น 500 ม.
กล้องสำรวจสำรวจด้วยกล้องสำรวจและวัดความเร็วรอบทำหน้าที่เป็นพื้นฐานทางภูมิศาสตร์สำหรับการสำรวจกล้องสำรวจและภูมิประเทศ และยังใช้เมื่อทำการวัดวัตถุในอสังหาริมทรัพย์และแก้ไขปัญหาทางวิศวกรรมอีกด้วย
พิกัดของจุดของกล้องสำรวจและทางวัดความเร็วและความสูงของจุดของทางวัดความเร็วถูกคำนวณในระบบพิกัดและความสูงระดับชาติ เพื่อจุดประสงค์นี้ กล้องสำรวจและเครื่องวัดความเร็วรอบจะเชื่อมโยงกับจุดของเครือข่ายของรัฐ
■ 11.3. การเลือกขนาดของการสำรวจภูมิประเทศและความสูงของส่วนบรรเทา _ _ _ _ _ _
มาตราส่วนการสำรวจและความสูงของส่วนบรรเทาจะกำหนดเนื้อหาและความแม่นยำในการวางแผนสถานการณ์และการบรรเทาทุกข์ในแผนภูมิประเทศหรือแผนที่
ด้วยการเพิ่มขนาดของการสำรวจภูมิประเทศและความสูงของส่วนบรรเทาทุกข์ที่ลดลง ความแม่นยำของแผนและแผนที่ รวมถึงรายละเอียดของสถานการณ์และภูมิประเทศที่ปรากฎบนนั้นก็เพิ่มขึ้น ความแม่นยำของการวัดภาคสนามระหว่างการสำรวจจะต้องสอดคล้องกับความแม่นยำของมาตราส่วนที่จะร่างแผน ดังนั้นยิ่งจำเป็นต้องมีความแม่นยำและรายละเอียดมากขึ้นในการรับข้อมูลจากแผนในระหว่างการออกแบบและการคำนวณอื่น ๆ ยิ่งควรดำเนินการสำรวจที่แม่นยำยิ่งขึ้นและขนาดของแผนก็ควรมีมากขึ้น
อย่างไรก็ตาม การเพิ่มความแม่นยำและรายละเอียดของการสำรวจทำให้เกิดความยุ่งยากในวิธีการผลิต และทำให้ต้นทุนแรงงานและเงินต่อหน่วยพื้นที่ที่ทำการสำรวจเพิ่มขึ้น ดังนั้นเมื่อทำการสำรวจภูมิประเทศ คุณควรเลือกมาตราส่วนและส่วนนูนที่จะให้สิ่งที่จำเป็น ความแม่นยำรายละเอียดและ ความสมบูรณ์ของภาพขององค์ประกอบภูมิประเทศด้วยต้นทุนการทำงานขั้นต่ำดังนั้นเงื่อนไขหลักๆ ทางเลือกที่เหมาะสมขนาดของการสำรวจและความสูงของส่วนบรรเทาคือความสอดคล้องระหว่างความแม่นยำของแผนหรือแผนที่กับความแม่นยำที่ต้องการในการออกแบบและถ่ายโอนโครงการสู่ธรรมชาติ
ภายใต้ความแม่นยำ แผนภูมิประเทศ(แผนที่) เข้าใจค่าเฉลี่ยหรือข้อผิดพลาดสูงสุดที่อนุญาตในตำแหน่งของรูปทรง วัตถุภูมิประเทศ และความสูงของจุดที่สัมพันธ์กับ
312 สำหรับการวางแผนและการจัดส่วนสูง
ข้อผิดพลาดโดยเฉลี่ยในตำแหน่งในแผนของจุดสถานการณ์
สัมพันธ์กับจุดสำรวจที่ใกล้ที่สุด เหตุผลไม่ควรเกิน":
วัตถุและรูปทรงที่มีโครงร่างชัดเจน - 0.5 มม. ในพื้นที่ภูเขาและป่าไม้ - 0.7 มม.
ในพื้นที่ที่มีเมืองหลวงและอาคารหลายชั้น ข้อผิดพลาดสูงสุดในตำแหน่งสัมพัทธ์บนแผนผังจุดของรูปทรงที่ใกล้ที่สุด (โครงสร้างเมืองหลวง อาคาร ฯลฯ ) ไม่ควรเกิน 0.4 มม.
ข้อผิดพลาดโดยเฉลี่ยในการสำรวจภูมิประเทศ สัมพันธ์กับจุดที่ใกล้ที่สุดของเหตุผลทางภูมิศาสตร์ไม่ควรสูงเกิน:
1/4 ของความสูงที่ยอมรับของส่วนนูน h ที่มุมเอียงสูงสุด 2°;
1/3 ชม. ที่มุมเอียงตั้งแต่ 2 ถึง 6° สำหรับแผนของมาตราส่วน 1:5000, 1:2000 และสูงถึง 10° สำหรับแผนของมาตราส่วน 1:1000 และ 1:500;
1/2 ชม. โดยมีส่วนผ่อนแรงทุกๆ 0.5 ม. บนแผนมาตราส่วน 1:5000 และ 1:2000
ในพื้นที่ป่า ค่าความคลาดเคลื่อนเหล่านี้เพิ่มขึ้น 1.5 เท่า จำนวนรูปทรงบนแผนที่และแผนผังในพื้นที่ที่มีมุมลาดมากกว่า 6° สำหรับแผนผังที่สเกล 1:5000 และมากกว่า 10° สำหรับแผนผังที่สเกล 1:1000 และ 1:500 ควรสอดคล้องกับความแตกต่างของความสูงที่กำหนดที่ส่วนโค้งของทางลาด , และ ข้อผิดพลาดความสูงเฉลี่ยจุดลักษณะเฉพาะของการผ่อนปรนไม่ควรเกิน 1/3 ใน
โดยกำหนดความสูงของส่วนนูน
ปัจจัยที่มีอิทธิพลต่อการเลือกขนาดการยิงแบ่งออกเป็นการผลิต ธรรมชาติ เทคนิค และเศรษฐกิจ
ใน ในปัจจุบันเพื่อตอบสนองความต้องการของภาคอุตสาหกรรม
และ วิศวกรรมโยธา การเลือกขนาดการสำรวจและแผนงานได้รับการควบคุมโดยคนจำนวนมาก เอกสารกำกับดูแลโดยคำนึงถึงลักษณะเฉพาะ แต่ละสายพันธุ์การก่อสร้าง. ตามกฎแล้วสำหรับขั้นตอนการออกแบบแต่ละขั้นตอนจะมีการกำหนดระดับการสำรวจและแผนสองหรือสามระดับ
ในการคำนวณขนาดการสำรวจล่วงหน้าโดยคำนึงถึงข้อกำหนดการออกแบบสำหรับการจัดวางอาคารและโครงสร้างในแหล่งกำเนิดโดยใช้วิธีกราฟิกในการเตรียมข้อมูลการออกแบบคุณสามารถใช้สูตร:
โดยที่ Dstr คือใบอนุญาตก่อสร้างสำหรับการวางวัตถุในแหล่งกำเนิด £rraf - ความแม่นยำแบบกราฟิกของขนาดแผน M เป็นตัวหารของขนาดการยิง
เพื่อพิสูจน์การเลือกขนาดของการสำรวจภูมิประเทศเมื่อจัดทำแผนที่ดิน ฯลฯ และเพื่อสะท้อนถึงข้อมูลที่เชื่อถือได้เกี่ยวกับการจดทะเบียนที่ดินเชิงปริมาณจึงใช้เกณฑ์
ข้อผิดพลาดที่อนุญาตในการกำหนดพื้นที่ของไซต์ ในกรณีนี้ตัวหารที่คำนวณได้ของขนาดการยิงจะถูกกำหนดเป็น
โดยที่ S คือพื้นที่เฉลี่ยของพื้นที่ประเมิน, เฮกตาร์ ms คือข้อผิดพลาดที่อนุญาตในการกำหนดพื้นที่ (เป็นเปอร์เซ็นต์) ขึ้นอยู่กับปัจจัยต่างๆ เช่น การให้คะแนนที่ดินเพื่อเกษตรกรรม ราคาที่ดินในเมือง เป็นต้น
ความสูงของส่วนนูนกำหนดความถูกต้องแม่นยำของภาพนูนต่ำและส่งผลต่อคุณภาพของงานโดยเฉพาะโครงการวางแผนแนวตั้ง ความสูงของส่วนนูนจะถูกกำหนดขึ้นอยู่กับขนาดของแผนและลักษณะของภูมิประเทศในลักษณะที่เส้นแนวนอนบนแผนไม่รวมเข้าด้วยกัน ภาพนูนนั้นแสดงออกมาด้วยความแม่นยำเพียงพอและง่ายต่อการ อ่าน.
สำหรับแผนภูมิประเทศและแผนที่มาตราส่วน 1:5000-1:25,000 ความสูงของส่วนนูนสามารถคำนวณได้โดยใช้สูตร:
โดยที่ M เป็นตัวหารของมาตราส่วนตัวเลขของแผน
ดังนั้น สำหรับมาตราส่วน 1:10,000 ค่า h ที่คำนวณโดยใช้สูตรนี้จะเท่ากับ 2 เมตร สำหรับมาตราส่วน 1:5000 - 1 เมตร
ความสูงของส่วนนูนสามารถกำหนดได้จากความสัมพันธ์:
h = 5mh หรือ h = 5t, h n"
โดยที่ mh คือค่าคลาดเคลื่อนกำลังสองเฉลี่ยในการพิจารณาส่วนที่เกินระหว่างการถ่ายภาพ tn - ข้อผิดพลาดกำลังสองเฉลี่ยในการกำหนดความสูงของจุดตามเส้นแนวนอนบนแผน
ขึ้นอยู่กับลักษณะของภูมิประเทศ (ที่ราบ, เป็นเนินเขา, ขรุขระ, ภูเขาและเชิงเขา) สำหรับแต่ละระดับการสำรวจ 2-4 ค่าความสูงของส่วนนูนได้รับการยอมรับ: สำหรับมาตราส่วน 1:5000 -0.5 - 5.0 ม.; 1:2000 - 0.5 -2.0 ม.; 1:1000 และ 1:500 - 0.5 - 1.0 ม
ในกรณีพิเศษ เมื่อทำการสำรวจพื้นที่ที่เตรียมไว้และวางแผนไว้ด้วยมุมสูงสุดที่น้อยกว่า 2° อนุญาตให้มีความสูงส่วนบรรเทา 0.25 ม. ในพื้นที่ขนาดใหญ่ของแผนการสำรวจซึ่งมีมุมเอียงทั่วไปของภูมิประเทศ ต่างกัน 2° ขึ้นไป อนุญาตให้ใช้ส่วนนูนสองความสูงได้ ในพื้นที่ที่ระยะห่างระหว่างเส้นแนวนอนหลักบนแผนผังเกิน 2.5 ซม. ควรใช้กึ่งแนวนอน* เพื่ออธิบายรายละเอียดลักษณะของภาพนูน
* คำแนะนำในการสำรวจภูมิประเทศในระดับ 1:5000, 1:2000, 1:1000 และ 314 1:500 อ.: เนดรา, 1985.
และ 11.4. การสำรวจกล้องสำรวจ_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
การสำรวจกล้องสำรวจจะดำเนินการเพื่อจัดทำแผนแนวนอน (รูปร่าง) ของอสังหาริมทรัพย์ที่มีสถานการณ์ที่ซับซ้อน ฯลฯ ในขนาดใหญ่ (1:500-1:200)
มุมแนวนอนระหว่างการถ่ายภาพวัดด้วยกล้องสำรวจ และวัดความยาวของเส้นด้วยเทปวัด เทปวัดเลเซอร์ หรือเรนจ์ไฟนเดอร์ โดยมีข้อผิดพลาดสัมพัทธ์ไม่เกิน 1/2000
การสำรวจกล้องสำรวจจะดำเนินการจากจุดและด้านข้างของการสำรวจด้วยกล้องสำรวจ ในรูปแบบต่างๆ(วิธีพิกัดเชิงขั้ว, วิธีจัดแนวตั้งฉาก, ทางแยกเชิงเส้นและเชิงมุม) ขึ้นอยู่กับลักษณะของภูมิประเทศ ฯลฯ (รูปที่ 11.2)
ข้าว. 11.2. วิธีรับรู้สถานการณ์:
a, b - sp o b p e r p e n d i k u l a r o v; c - วิธีพิกัดเชิงขั้ว; g - sp เกี่ยวกับมุมของการตัด; d - s เกี่ยวกับ s ob l i n e x สำหรับการตัด;
e - s o b s t o ra
เมื่อทำการถ่ายภาพ โครงร่างจะถูกวาดพร้อมกับการวัด (รูปที่ 11.3) ซึ่งจะระบุผลการวัดและสถานการณ์ ข้อมูลนี้จำเป็นเมื่อจัดทำแผนภูมิประเทศ
C h a p t e r
ข้าว. 11.3. โครงร่างของพื้นที่ถ่ายภาพ
วิธีพิกัดเชิงขั้วประกอบด้วยการวัดด้วยกล้องสำรวจมุมแนวนอนจากด้านข้างของกล้องสำรวจสำรวจไปยังทิศทางของจุดและระยะห่างจากด้านบนของมุมที่วัดถึงจุดที่ถ่ายด้วยเทปเหล็กหรือเทปวัดเลเซอร์แสงหรือ เครื่องวัดระยะเส้นใย
วิธีการตั้งฉากตำแหน่งของจุดรูปร่างถูกกำหนดโดยการวัดด้วยเทปเหล็กเพื่อวัดความยาวของตั้งฉากที่ลดลงจากจุดไปด้านข้างของการสำรวจกล้องสำรวจและระยะห่างจากจุดเริ่มต้นของด้านข้างถึงฐานของตั้งฉาก
ตั้งฉากสั้น ๆ ด้วยตาหรือใช้สายวัด ส่วนยาว - ด้วยสายวัดเลเซอร์
วิธีเซอริฟแบบมุมวิธีการนี้ใช้ในกรณีที่วัดระยะทางไปยังจุดที่กำหนดได้ยาก จากจุดสองจุดของการสำรวจด้วยกล้องสำรวจ มุมระหว่างด้านข้างจะถูกวัด
316 ของการเคลื่อนที่และทิศทางไปยังจุดที่กำหนดในครึ่งก้าว
ด้วยความแม่นยำ 30" มุมบากไม่ควรน้อยกว่า 30° และมากกว่า 150°
ในตอนท้ายของงานภาคสนามโดยใช้พิกัดหรือไม้บรรทัด F.V. Drobysheva และคณะ สร้างตารางพิกัดในรูปแบบของตารางสี่เหลี่ยมที่มีด้าน 10 ซม. จุดสำรวจของกล้องสำรวจถูกพล็อตโดยใช้พิกัดที่คำนวณได้ จุดรูปร่างบนแผนถูกสร้างขึ้นจากจุดที่ด้านข้างของการสำรวจกล้องสำรวจตามโครงร่าง (รูปที่ 11.3)
วิธีการสำรวจภูมิประเทศนี้ใช้ในพื้นที่เปิดโล่งขนาดเล็กที่มีภูมิประเทศสงบ
วิธีเซอริฟเชิงเส้นใช้เมื่อถ่ายภาพวัตถุที่มีเส้นขอบที่ชัดเจน จากจุดสองจุดของการสำรวจกล้องสำรวจระยะทางไปยังจุดที่กำหนดจะถูกวัดด้วยเทปหรือเทปเลเซอร์และความยาวของรอยบากไม่ควรเกินความยาวของอุปกรณ์วัด (20-50 ม.) มุมของอาคารรองรับถูกกำหนดโดยการควบคุมด้วยรอยบากสามอัน
วิธีการจัดตำแหน่งประกอบด้วยการกำหนดตำแหน่งของวัตถุที่สัมพันธ์กับเส้นการจัดตำแหน่ง ซึ่งเป็นหนึ่งในด้านของการเคลื่อนที่ในแนวตั้ง วิธีการจัดตำแหน่งจะรวมกับวิธีการของคูตั้งฉากและรอยบากเชิงเส้น มีการใช้กันอย่างแพร่หลายในการสำรวจภายในบล็อก
ความยาวของด้านการเคลื่อนที่ของกล้องสำรวจวัดโดยใช้เทปวัด (รูเล็ต) หรือเครื่องวัดระยะ เมื่อวัดความยาวของเส้นด้วยเทป ค่าคลาดเคลื่อนสัมพัทธ์ไม่ควรเกิน 1/2000 แนะนำให้มีด้านของเส้นขีดเท่ากันโดยประมาณ ความยาวขั้นต่ำของด้านเส้นขีดคือ 40 ม. สูงสุดคือ 350 เมตร โดยเฉลี่ยอยู่ที่ 200 - 250 ม. เมื่อวัดด้านข้างของระยะชักด้วยเครื่องค้นหาระยะแสง ความยาวของเส้นจะเพิ่มขึ้นเป็น 500 ม.
ความยาวของกล้องสำรวจสำรวจขึ้นอยู่กับขนาดการสำรวจ (ตาราง 11.1) ตัวอย่างเช่น เมื่อสำรวจที่มาตราส่วน 1:500 ความยาวในการเดินทางไม่ควรเกิน 0.8 กม. ในพื้นที่สิ่งปลูกสร้าง และ 1.2 กม. ในพื้นที่ที่ยังไม่ได้รับการพัฒนา มุมแนวนอนในทางเดินของกล้องสำรวจวัดด้วยกล้องสำรวจที่มีความแม่นยำทางเทคนิคโดยใช้วิธีการเต็มรูปแบบ ความคลาดเคลื่อนระหว่างค่ามุมจากครึ่งก้าวไม่ควรเกิน 1 ส่วนบนของกล้องสำรวจถูกยึดด้วยเสาไม้และหมุดโลหะ
องค์ประกอบของงานภาคสนามและงานสำนักงานระหว่างการก่อสร้างกล้องสำรวจแบบปิด 1-2-3-4-5-1 แสดงไว้ในรูปที่ 1 11.1. จุดที่ 1 ของการเคลื่อนที่คือจุดรูปหลายเหลี่ยม ใช้กล้องสำรวจมุมแนวนอน P) วัด P2, P3, P4 ความยาวของด้านจังหวะ dx2, d23, d3 4, d4_j วัดด้วยเทปวัด วัดแต่ละด้านสองครั้ง: ในทิศทางไปข้างหน้าและย้อนกลับ ความแม่นยำในการวัดมุม Г ความยาวของด้านคือ Ad / d = 1/2000
ข้อมูลการวัดการเคลื่อนที่ของกล้องสำรวจจะถูกบันทึกไว้ในวารสาร (ตาราง 11.2)
ความยาวที่อนุญาตของการสำรวจกล้องสำรวจ, กม |
ตารางที่ 11.1 |
||||
พื้นที่เปิดโล่งที่สร้างขึ้น |
พื้นที่ปิด |
||||
อาณาเขต |
|||||
เพื่อการเคลื่อนที่สำรวจด้วยกล้องสำรวจที่แม่นยำ |
|||||
ตารางที่ 11.2
วารสารการวัดมุมแนวนอนและมุมเอียง
№ เลขที่ ตำแหน่งนับตามส่วนต่าง ค่าเฉลี่ยนับตามมูลค่าสถานที่
แนวตั้ง |
ขอบฟ้า |
นับมูลค่าตามแนวตั้ง |
||||
วงกลมใหม่ |
ทัล |
มุมของวงกลม |
||||
1 ,0 " |
||||||
ข้อมูลการวัดมุมแนวนอนที่ตำแหน่งสองตำแหน่งของวงกลมแนวตั้งของกล้องสำรวจ (KA และ KP) จะถูกป้อนลงในคอลัมน์ที่สอดคล้องกันของบันทึกประจำวัน ข้อมูลเริ่มต้นสำหรับการคำนวณพิกัดของจุดการเคลื่อนที่ของกล้องสำรวจคือ:
พิกัดของจุดที่ 1 x(, yx (เช่น จุดโพลิโกโนเมตรี) - ตำแหน่งแนวนอนของด้านข้างของการเคลื่อนที่ - มุมแนวนอน
มุมทิศทางของด้านเดิม a12; a2 3 = ax2 + 180° - P2.
และ 11.5 การสํารวจความเร็วรอบ _ _ _ _ _ _ _ _ _ _ _ _ _
“ตาเชโอ” แปลว่า เร็ว. เมื่อทำการสำรวจความเร็วรอบ การเคลื่อนที่แบบความเร็วรอบหรือการสำรวจด้วยกล้องสำรวจจะถูกวางเป็นเหตุผลในการสำรวจ ตามด้วยการปรับระดับจุดต่างๆ เพื่อเร่งการทำงาน การสำรวจความเร็วรอบสามารถทำได้พร้อมกันกับการสร้างการเคลื่อนที่แบบหมุนรอบ
การเคลื่อนที่แบบวัดความเร็วเป็นเส้นขาดบนพื้น ซึ่งจุดยอดทั้งหมดได้รับการแก้ไขตามลำดับ มีการเลือกจุดเดินทางบนภูมิประเทศเพื่อให้แน่ใจว่ามีการมองเห็นร่วมกัน
ภาพรวมรอบจุดเพื่อความสะดวกในการยิงครั้งต่อไปในรัศมี 150-200 ม.
ความยาวของการเคลื่อนที่แบบวัดความเร็วถูกกำหนด (ขึ้นอยู่กับมาตราส่วนการสำรวจและความแม่นยำในการวัด) โดยใช้สูตรสำหรับความคลาดเคลื่อนสัมพัทธ์สูงสุดของการเคลื่อนที่แบบวัดความเร็ว
การสำรวจความเร็วรอบจะดำเนินการโดยใช้เครื่องวัดวามเร็วหรือกล้องสำรวจเมื่อสร้างแผนผังที่ดินขนาดใหญ่ในพื้นที่ขรุขระและมีสิ่งปลูกสร้าง ด้วยการใช้สถานีรวมอิเล็กทรอนิกส์ ทำให้สามารถสร้างแบบจำลองดิจิทัลของภูมิประเทศและวัตถุอสังหาริมทรัพย์เมื่อแก้ไขปัญหาทางสถาปัตยกรรม เหตุผลในการวางแผนมักสร้างขึ้นโดยการวางทางเดินกล้องสำรวจ เครื่องหมายของจุดผ่านกล้องสำรวจถูกกำหนดโดยการปรับระดับทางเรขาคณิต (เหตุผลในระดับความสูง) วัตถุ รูปทรง และภูมิประเทศถูกถ่ายภาพโดยใช้วิธีโพลาร์ เครื่องหมายจุดจะถูกกำหนดโดยการปรับระดับตรีโกณมิติ
เมื่อถ่ายภาพด้วยมาตราส่วน 1:2000 โดยมีหน้าตัดนูน อนุญาตให้ใช้เส้นแนวนอนทุกๆ 1 เมตร S< 100 м при съемке границ конту ров и 5 < 250 м - при съемке рельефа. Расстояние между пикета ми на равнинной местности не должно превышать 40 м (2 см на плане).
เมื่อถ่ายภาพสถานการณ์หรือภูมิประเทศ มุมแนวตั้งและแนวนอนจะถูกวัดที่ตำแหน่งหนึ่งของวงกลมแนวตั้งของมาตรวัดความเร็ว และระยะทางถึงจุดแร็ค (ซี่ฟัน) จะถูกวัดด้วยเครื่องค้นหาระยะ
จุดชั้นวางจะถูกเลือกในสถานที่ที่มีลักษณะเป็นโครงสร้างแนวตั้งของการนูน - บนยอดเขา, แนวสันปันน้ำ, ริมฝั่งอ่างเก็บน้ำและ ณ จุดที่เป็นลักษณะเฉพาะของสถานการณ์
ขั้นตอนการดำเนินงานที่สถานีมีดังนี้:
1) ติดตั้งเครื่องวัดวามเร็วในตำแหน่งทำงานเหนือจุดของโอโดไลท์คอร์ส ในระหว่างการสำรวจ จะมีการวาดโครงร่างขึ้นในแต่ละสถานี - แผนผังของสถานการณ์และภูมิประเทศซึ่งแสดงตำแหน่งและจำนวนคะแนน ซึ่งจะช่วยอำนวยความสะดวกในการประมวลผลผลการสำรวจวัดความเร็วรอบในภายหลัง งานนี้เสร็จสิ้นโดยการตรวจสอบความไม่สามารถเคลื่อนไหวของแขนขาและความคงตัวของ MO วัดความสูงของอุปกรณ์ทำเครื่องหมาย
ของเธอ บนรางรถไฟและบันทึกไว้ในสมุดบันทึก
2) แขนขานั้นมุ่งเน้นไปที่จุดที่ใกล้ที่สุดของจังหวะที่เพิ่มขึ้น
3) ติดตั้งไม้เท้าตามลำดับที่จุดลักษณะของภูมิประเทศและมองเห็นเพื่อให้ด้ายแนวตั้งของตารางอยู่ในแนวเดียวกับแกนของไม้เท้าและแนวนอนที่มีเครื่องหมายความสูงของอุปกรณ์ฉันอยู่บนรถไฟ วัดมุมแนวนอนและแนวตั้งและกำหนดระยะห่างถึงพนักงานโดยใช้เรนจ์ไฟนเดอร์
งานในสำนักงานระหว่างการสำรวจ tacheometric ประกอบด้วยการคำนวณมุมเอียง เค้าโครงแนวนอนของระยะทางที่วัดได้ ระดับความสูง เครื่องหมายจุด การวาดและการออกแบบแผนผังไซต์
การวาดและวาดแผน tacheometric รวมถึง: การสร้างตารางพิกัด, การซ้อนทับจุดตามพิกัด, การวาดจุดชั้นวาง, การวาดรูปนูนโดยคำนึงถึงทิศทางของการยุบตัวของภูมิประเทศ, การวาดรูปทรง, การวาดและการออกแบบแผนโดยใช้สัญลักษณ์ตาชั่ง 1:5000, 1:2000, 1 :1000 และ 1:500
มีการร่างโครงร่างขึ้นมา ความสนใจเป็นพิเศษ- มันถูกวาดด้วยมือในระดับใดก็ได้ โดยจะเท่ากับขนาดของแผนโดยประมาณ สถานีที่ทำการสำรวจนั้นตั้งอยู่ตรงกลางพื้นที่ที่ไม่ถูกสำรวจ เส้นขีดก่อนหน้าและถัดไปจะถูกวาดโดยใช้ไม้บรรทัด อย่าลืมระบุการอ่านเป็นวงกลมแนวนอน เท่ากับศูนย์ตามแนวเส้นการเดินทางที่หน้าปัดวางอยู่
จุดลักษณะและเส้นโครงกระดูกของการนูนจะถูกวาดขึ้นพร้อมกับทิศทางการล่มสลายของทางลาด
เมื่อทำแผนที่อาณาเขต จะมีการใช้การสำรวจภูมิประเทศแบบดิจิทัลโดยใช้ระบบดาวเทียม GLONASS / GPS
11.6. ภูมิประเทศสมัยใหม่_ _ _ _ _ _ _ _ _ _ _ _ _ _ _
ภูมิประเทศดิจิทัลนั้น เวทีที่ทันสมัยการพัฒนาภูมิประเทศ - การศึกษาทางภูมิศาสตร์และเรขาคณิตของพื้นที่ผ่านงานสำรวจ (บนพื้นดิน จากอากาศ จากอวกาศ) และการสร้างแผนที่ภูมิประเทศตามวัสดุที่ได้รับ รูปแบบหลักของผลการสำรวจภูมิประเทศดิจิทัลคือข้อมูลดิจิทัล
ระบบอัตโนมัติของกระบวนการสำรวจภูมิประเทศภาคพื้นดินได้รับการรับรองโดยการแนะนำแนวทางปฏิบัติทางภูมิศาสตร์ของวิธีการใหม่ ระบบในการรวบรวมและ การประมวลผลหลักข้อมูลภูมิประเทศและจีโอเดติกซึ่งสามารถแยกแยะมาตรวัดความเร็วแบบอิเล็กทรอนิกส์ได้
ประสิทธิภาพของการใช้การสำรวจสถานีรวมอิเล็กทรอนิกส์ (ETS) เมื่อเปรียบเทียบกับวิธีการแบบเดิมนั้นทำได้โดยการเพิ่มพื้นที่สำรวจจากสถานีเดียวเป็นหลัก
เครื่องวัดความเร็วรอบแบบอิเล็กทรอนิกส์สมัยใหม่ผสมผสานกล้องสำรวจแบบอิเล็กทรอนิกส์ เครื่องวัดระยะแสง ไมโครคอมพิวเตอร์เข้ากับแพ็คเกจ
โปรแกรมแอพพลิเคชั่นและเครื่องบันทึกข้อมูล (โมดูลหน่วยความจำ - 320)
ในการควบคุมการทำงานของอุปกรณ์จะใช้แผงควบคุมพร้อมแป้นพิมพ์สำหรับป้อนข้อมูลและสัญญาณควบคุม ผลการวัดจะแสดงบนหน้าจอแสดงผล (จอแสดงผลดิจิตอล) และป้อนลงในการ์ดหน่วยความจำโดยอัตโนมัติ การถ่ายโอนข้อมูลที่สะสมไปยังคอมพิวเตอร์สามารถทำได้โดยตรงจากการ์ดหน่วยความจำหรือโดยการเชื่อมต่อเครื่องวัดวามเร็วเข้ากับคอมพิวเตอร์
กับ โดยใช้สายเชื่อมต่อ
ใน โดยหลักการแล้ว ขั้นตอนในการสร้างการสำรวจความเร็วรอบแบบอิเล็กทรอนิกส์จะคล้ายกับการสำรวจที่ดำเนินการโดยเครื่องวัดความเร็วรอบแบบออปติคอล มีการติดตั้งสถานีรวมอิเล็กทรอนิกส์ในตำแหน่งทำงานที่สถานีสำรวจ ที่จุดรั้วจะมีการติดตั้งเสาพิเศษพร้อมตัวสะท้อนแสงตามลำดับและเมื่อชี้ไปที่ระยะทางมุมแนวนอนและแนวตั้งจะถูกกำหนดโดยอัตโนมัติ ไมโครคอมพิวเตอร์ของเครื่องวัดความเร็วรอบจะคำนวณการเพิ่มขึ้นของพิกัด Ax, Ay โดยคำนึงถึงการแก้ไขตามผลการวัด ผลการวัดจะถูกป้อนลงในอุปกรณ์จัดเก็บข้อมูลซึ่งข้อมูลจะถูกส่งไปยังคอมพิวเตอร์ การใช้โปรแกรมพิเศษ การประมวลผลขั้นสุดท้ายจะดำเนินการเพื่อให้ได้ข้อมูลที่จำเป็นสำหรับการสร้างแบบจำลองภูมิประเทศดิจิทัลหรือแผนภูมิประเทศ
และ 11.7. ปรับระดับพื้นผิวด้วยสี่เหลี่ยม_ _ _ _ _ _ _
ขนาดของด้านข้างของช่องสี่เหลี่ยมนั้นอยู่ที่ 10 หรือ 20 ม. ขึ้นอยู่กับความซับซ้อนของภูมิประเทศ ตารางของช่องสี่เหลี่ยมถูกแบ่งโดยใช้กล้องสำรวจและเทปเหล็ก ด้านบนของสี่เหลี่ยมนั้นยึดด้วยหมุด ตำแหน่งที่วางแผนไว้ของจุดอ้างอิงถูกกำหนดโดยการวางกล้องสำรวจและตำแหน่งระดับความสูง - โดยการปรับระดับทางเทคนิค ด้านข้างและจุดยอดของสี่เหลี่ยมใช้เพื่อถ่ายภาพสถานการณ์โดยใช้วิธีตั้งฉาก เครื่องหมายของยอดสี่เหลี่ยมจัตุรัสตลอดจนจุดลักษณะเฉพาะของส่วนนูนภายในสี่เหลี่ยมนั้น ถูกกำหนดโดยการปรับระดับจากสถานีปรับระดับหนึ่งสถานี โดยเลือกในลักษณะที่สามารถอ่านค่าได้จากแท่นนั้นไปตามแผ่นระแนงที่ติดตั้งในแต่ละจุด จุดเหล่านี้ การอ่านจะอ่านเฉพาะด้านสีดำของไม้เท้าเท่านั้น เครื่องหมายจุดจะถูกคำนวณผ่านขอบฟ้าของอุปกรณ์ Argp โดยปัดให้เป็นเศษหนึ่งในร้อยของเมตร และเขียนลงในแผนภาพที่เตรียมไว้ล่วงหน้าซึ่งจะแทนที่บันทึก
ในการสร้างแผนภูมิประเทศตามผลลัพธ์ของการปรับระดับด้วยสี่เหลี่ยมจัตุรัส ตารางสี่เหลี่ยมจัตุรัสจะถูกวาดบนแผนตามขนาดที่กำหนด และความสูงของสี่เหลี่ยมจัตุรัสจะถูกเขียนเทียบกับจุดยอด จากข้อมูลโครงร่าง รูปทรงของภูมิประเทศจะถูกสร้างขึ้น หลังจากนั้นเส้นแนวนอนจะถูกวาดโดยใช้วิธีการประมาณค่า โดยคำนึงถึงทิศทางของความกดทับของภูมิประเทศ (รูปที่ 11.4) แผนถูกเขียนขึ้นด้วยสัญลักษณ์
ไม่มี -
น
แข็ง |
แนวนอน |
การปรับระดับ |
||
พื้นผิวตาม |
||||
ดำเนินการ |
||||
สี่เหลี่ยม |
||||
นักเรียนโบวี่เลฟ |
||||
หลักสูตรที่ 3 กลุ่มละ 10 คน |
||||
ข้าว. 11.4. ตัวอย่างการเขียนแผนผังปรับระดับพื้นผิวเป็นสี่เหลี่ยม
■ 11.8. ข้อมูลเกี่ยวกับระบบระบุตำแหน่งด้วยดาวเทียม GLONASS / GPS
ปัจจุบันมีระบบดาวเทียมในการระบุพิกัดอยู่ 2 ระบบ ได้แก่ ระบบ GLONASS ของรัสเซีย (Global Navigation Satellite System) และระบบ NAVSTAR GPS ของอเมริกา (ระบบนำทางสำหรับการกำหนดระยะทางและเวลา) ระบบทั่วโลกตำแหน่ง)
กาลิเลโอเป็นโครงการระบบนำทางด้วยดาวเทียมของยุโรป นั่นคือความแตกต่างจากคนอเมริกันและ ระบบของรัสเซียระบบกาลิเลโอไม่ได้ถูกควบคุมโดยรัฐบาลหรือสถาบันทางทหารใดๆ การพัฒนาดำเนินการโดยองค์การอวกาศยุโรป
สาธารณรัฐประชาชนจีนกำลังพัฒนาระบบระบุตำแหน่งดาวเทียมอิสระ Beidou (ชื่อจีนว่า Northern Dipper ซึ่งเป็นชื่อจีนสำหรับกลุ่มดาว Ursa Major) ซึ่งในอนาคตควรจะเปลี่ยนเป็นระบบ COMPASS วันนี้เป่ยโต่วนำเสนอการกำหนดพิกัดทางภูมิศาสตร์ในประเทศจีนและดินแดนใกล้เคียง
มีการตัดสินใจที่จะสร้างระบบ 322 ที่คล้ายกันของเราเองในอินเดีย IRNSS (ระบบดาวเทียมนำทางภูมิภาคของอินเดีย)
ด้วยความช่วยเหลือจากดาวเทียม 7 ดวง จะให้บริการครอบคลุมภูมิภาคของอินเดียและบางส่วนของรัฐใกล้เคียง
ปัจจุบันมีดาวเทียม NAVSTAR ประมาณ 30 ดวง GLONASS ประมาณ 20 ดวง และดาวเทียม COMPASS 3 ดวงในอวกาศใกล้โลก
ตารางที่ 11.3
ลักษณะสำคัญของระบบนำทางด้วยดาวเทียม
คุณสมบัติหลัก |
|||
หมายเลข I SZ (สำรอง) |
24 (6 ) |
24 (6 ) |
|
จำนวนระนาบการโคจร |
|||
จำนวน I SZ ในวงโคจร |
|||
เครื่องบิน |
|||
ใกล้เป็นวงกลม |
|||
ความสูงของวงโคจร, กม |
|||
ความเอียงของวงโคจร, องศา |
|||
ระบบพิกัด |
|||
ระบบระบุตำแหน่งดาวเทียมประกอบด้วยสามส่วน: กลุ่มดาวของยานอวกาศ (ดาวเทียม) การตรวจสอบและควบคุมภาคพื้นดิน และอุปกรณ์รับสัญญาณ (อุปกรณ์ของผู้ใช้)
ส่วนยานอวกาศ แต่ละ ระบบที่ทันสมัย GPS และ GLONASS ประกอบด้วยดาวเทียม 24 ดวง (ใช้งานอยู่ 21 ดวงและสำรอง 3 ดวง) ซึ่งโคจรรอบโลกในวงโคจรเกือบเป็นวงกลม วงโคจรของดาวเทียม GPS ตั้งอยู่ในระนาบหกระนาบ โดยแต่ละระนาบมีดาวเทียม 4 ดวง (รูปที่ 11.5, a) ระดับความสูงของวงโคจรเฉลี่ยอยู่ที่ประมาณ 20,180 กม. ระยะเวลาการปฏิวัติของดาวเทียมรอบโลกคือ 11 ชั่วโมง 58 นาที ดาวเทียมจำนวนนี้และตำแหน่งของพวกมันทำให้สามารถรับสัญญาณจากดาวเทียมอย่างน้อยสี่ดวงทั่วโลกพร้อมกันได้ตลอดเวลา
ดาวเทียม GLONASS หมุนรอบโลกด้วยระนาบการโคจร 3 ระนาบ โดยแต่ละระนาบมีดาวเทียม 8 ดวง (รูปที่ 11.5,6) ที่ระดับความสูงประมาณ 19,150 กม. ระยะเวลาการโคจร - 11 ชั่วโมง 16 นาที
ดาวเทียมแต่ละดวงมี GPS และ GLONASS ติดตั้งอยู่ แผงเซลล์แสงอาทิตย์อุปกรณ์จ่ายไฟ การรับและส่งสัญญาณ มาตรฐานความถี่และเวลา คอมพิวเตอร์ออนบอร์ด และตัวสะท้อนแสงสำหรับระยะเลเซอร์
ส่วนการควบคุมภาคพื้นดินและการจัดการ ประกอบด้วยเครือข่ายสถานีติดตามดาวเทียมที่กระจายอย่างสม่ำเสมอทั่วประเทศ บริการเวลาที่แม่นยำ สถานีหลักพร้อมศูนย์คอมพิวเตอร์ และสถานีดาวน์โหลดข้อมูลบนดาวเทียม จากจุดติดตาม ระยะทางไปยังดาวเทียมแต่ละดวงจะถูกวัดวันละสองครั้งด้วยเครื่องวัดระยะแบบเลเซอร์ ข้อมูลที่รวบรวมเกี่ยวกับตำแหน่งของดาวเทียมในวงโคจร (ephemeris) จะถูกถ่ายโอน
จะถูกส่งไปยังคอมพิวเตอร์ออนบอร์ดของดาวเทียมแต่ละดวง ดาวเทียมจะปล่อยสัญญาณวิทยุการวัด ข้อมูลเวลาของระบบ พิกัด ฯลฯ ไปยังผู้ใช้อย่างต่อเนื่อง
ข้าว. 11.5. กลุ่มดาวและดาวเทียมร่วม: a - N AV STA R CPS; ข - G L O N A S S
ส่วนรับประกอบด้วยเครื่องรับสัญญาณดาวเทียม เสาอากาศ ชุดควบคุม แหล่งจ่ายไฟ
การระบุพิกัดของจุดต่างๆ บนพื้นผิวโลกโดยใช้ดาวเทียมจะขึ้นอยู่กับการวัดระยะด้วยคลื่นวิทยุจากดาวเทียมไปยังเครื่องรับที่ติดตั้ง ณ จุดที่กำหนด หากคุณวัดช่วงของดาวเทียมสูงสุดสามดวง (รูปที่ 11.6) พิกัดที่ทราบในเวลาที่กำหนดจากนั้นใช้วิธีการบากเชิงพื้นที่เชิงเส้นคุณสามารถกำหนดพิกัดของจุดตำแหน่งของเครื่องรับ R ได้ เนื่องจาก หากนาฬิกาบนดาวเทียมและเครื่องรับไม่ซิงโครไนซ์ ระยะทางที่กำหนดไปยังดาวเทียมจะแตกต่างจากระยะทางจริง ระยะทางที่ผิดพลาดดังกล่าวเรียกว่า "ช่วงหลอก" เพื่อกำจัดข้อผิดพลาดเหล่านี้ การกำหนดพิกัดของจุดที่มีความแม่นยำเพียงพอสามารถทำได้โดยการสังเกตดาวเทียมอย่างน้อย 4 ดวงพร้อมกัน
ระบบระบุตำแหน่งดาวเทียมทำงานในระบบพิกัดสี่เหลี่ยมเชิงพื้นที่กรีนิชซึ่งมีแหล่งกำเนิดตรงกับจุดศูนย์กลางมวลของโลก ในกรณีนี้ ระบบ GPS จะใช้พิกัดของระบบพิกัดทางภูมิศาสตร์ของโลก WGS-84 (World Geodetic System, 1984) และ GLONASS จะใช้ระบบพิกัด PZ-90 (พารามิเตอร์ Earth, 1990) ระบบพิกัดทั้งสองได้รับการจัดตั้งขึ้นอย่างเป็นอิสระจากกันโดยอาศัยผลลัพธ์ของการสังเกตการณ์เชิงภูมิศาสตร์และทางดาราศาสตร์ที่มีความแม่นยำสูง
เครื่องรับสมัยใหม่ส่วนใหญ่จะทำงานกับดาวเทียม GPS ดังนั้นพิกัดของจุดที่วัดจึงมักได้รับในระบบ WGS-84 หากต้องการไปที่ระบบพิกัดของรัฐหรือท้องถิ่นให้ใช้โปรแกรมที่ให้มา -
324 ฟังก์ชั่นการแปลงการประมวลผล
m CTPBEHM E K Y RT1GRD > I H EC Shi 1n u r m a sch
ข้าว. 11.6. แผนผังระบบกำหนดตำแหน่งดาวเทียม
■ 11.9. การสำรวจโทนสีดิจิทัลโดยใช้ระบบ GLONASS / GPS
วิธีการกำหนดพิกัดของจุด ตามที่ระบุไว้ก่อนหน้านี้ การกำหนดระยะทางจากเครื่องรับสัญญาณดาวเทียมถึงดาวเทียมนั้นไม่มีอะไรมากไปกว่าการวัดระยะด้วยคลื่นวิทยุ: เครื่องรับได้รับการสั่นของแม่เหล็กไฟฟ้าจากดาวเทียมเปรียบเทียบกับเครื่องของมันเองซึ่งสร้างโดยเครื่องกำเนิดของมันเองและผลที่ได้จะกำหนดระยะทาง ไปยังยานอวกาศ ช่วงวัดได้สองวิธี - รหัสและเฟส ในกรณีแรกจะมีการเปรียบเทียบรหัสของสัญญาณที่ได้รับจากดาวเทียมกับรหัสที่สร้างขึ้นในตัวรับเอง และในกรณีที่สองจะมีการเปรียบเทียบเฟสต่างๆ การวัดเฟสที่แม่นยำที่สุดคือ ใน GPS ดาวเทียมทุกดวงทำงานบนความถี่เดียวกัน แต่แต่ละดวงจะมีรหัสของตัวเอง ในทางกลับกัน ใน GLONASS ดาวเทียมแต่ละดวงจะมีความถี่ของตัวเอง แต่ดาวเทียมทุกดวงจะมีรหัสเดียวกัน
ข้อมูลทั้งหมดจะถูกถ่ายโอนจากดาวเทียมไปยังเครื่องรับโดยใช้สิ่งที่เรียกว่าการสั่นของแม่เหล็กไฟฟ้าแบบพาหะ ซึ่งปล่อยออกมาที่ความถี่สองความถี่ L1 และ L2
สัญญาณวิทยุเดินทางจากดาวเทียมไปยังเครื่องรับในระยะทางประมาณ 20,000 กม. และผ่านการรบกวนในชั้นบรรยากาศรอบนอก ชั้นบรรยากาศชั้นล่าง และใกล้กับพื้นผิวโลก ไอโอโนสเฟียร์ซึ่งอยู่ที่ระดับความสูง 50-100 กม. เหนือพื้นโลกประกอบด้วยสารอิสระ
อิเล็กตรอนและไอออนที่เปลี่ยนเส้นทางและความเร็วของคลื่นวิทยุจากดาวเทียม ข้อผิดพลาดที่เกิดจากอิทธิพลของอิเล็กตรอนส่วนใหญ่ขึ้นอยู่กับความเข้มข้น ดังนั้นจึงขึ้นอยู่กับมุมเงยของดาวเทียม ตำแหน่งทางภูมิศาสตร์ของจุดที่วัด เวลาของวันและปี กิจกรรมสุริยะ และสามารถเข้าถึงได้หลายสิบเมตร ความบิดเบี้ยวเหล่านี้สามารถกำจัดออกจากผลการสังเกตได้ด้วยการวัดที่ความถี่สองความถี่
นอกจากสัญญาณวิทยุจากดาวเทียมแล้ว เสาอากาศรับสัญญาณยังรับสัญญาณที่สะท้อนจากพื้นดินและ วัตถุต่างๆ- อาคาร ต้นไม้ ฯลฯ ผลที่ได้หลายทางทำให้เกิดการบิดเบือนของผลการวัดเมื่อใช้วิธีเฟสสูงถึงหลายเซนติเมตร ในการวัดรหัส - สูงถึงเมตร ตัวรับสัญญาณสมัยใหม่ใช้โปรแกรมปราบปรามหลายเส้นทางในตัวแบบพิเศษเพื่อต่อสู้กับแหล่งที่มาของข้อผิดพลาดนี้
ปัจจัยหนึ่งที่ทำให้ผลลัพธ์ของการวัดด้วยดาวเทียมแย่ลงอาจเกิดจากการรบกวนจากแหล่งกำเนิดคลื่นวิทยุที่ทรงพลังในบริเวณใกล้เคียง เช่น เครื่องระบุตำแหน่ง สถานีส่งสัญญาณโทรทัศน์และวิทยุ ฯลฯ
วิธีการกำหนดตำแหน่งสามารถแบ่งออกเป็นสองกลุ่ม - การกำหนดพิกัดสัมบูรณ์โดยวิธีโค้ดและการวัดเฟสสัมพัทธ์ (ดูรูปที่ 11.7)
ข้าว. 11.7. วิธีการระบุตำแหน่งดาวเทียม
เมื่อทำการวัดแบบสัมบูรณ์ จะมีการกำหนดพิกัดเต็มของจุดบนพื้นผิวโลก การสังเกตที่ดำเนินการ ณ จุดหนึ่งโดยไม่ขึ้นอยู่กับการวัดที่สถานีอื่นเรียกว่าแบบอัตโนมัติ การสังเกตแบบอัตโนมัตินั้นมีความไวต่อแหล่งที่มาของข้อผิดพลาดทั้งหมดถึง 326 ระดับ
ความแม่นยำในการกำหนดพิกัดคือ 15 -30 ม. และใช้ในการค้นหาพิกัดโดยประมาณในการวัดที่แม่นยำ
เพื่อเพิ่มความแม่นยำ การวัดสัมบูรณ์สามารถทำได้พร้อมกันที่จุดสองจุด: สถานีฐาน Pv ซึ่งอยู่ที่จุดที่มีพิกัดที่ทราบ (โดยปกติจะเป็นจุดในเครือข่าย geodetic ของรัฐ) และสถานีเคลื่อนที่ P2 ที่ติดตั้งเหนือจุดที่กำหนด (รูปที่. 11.8) ที่สถานีฐาน ระยะทางที่วัดได้ไปยังดาวเทียมจะถูกนำมาเปรียบเทียบกับระยะทางที่คำนวณจากพิกัด และความแตกต่างจะถูกกำหนด ความแตกต่างเหล่านี้เรียกว่า การแก้ไขส่วนต่างและวิธีการวัดก็คือ
ส่วนต่างการแก้ไขส่วนต่างจะถูกนำมาพิจารณาเมื่อคำนวณพิกัดของสถานีเคลื่อนที่หลังการวัดหรือเมื่อใช้โมเด็มวิทยุในระหว่างกระบวนการวัด วิธีดิฟเฟอเรนเชียลขึ้นอยู่กับการพิจารณาว่าที่ระยะทางค่อนข้างน้อยระหว่างสถานี PJf และ P2 (โดยปกติจะไม่เกิน 10 กม.) ข้อผิดพลาดในการวัดที่สถานีเหล่านั้นเกือบจะเท่ากัน เมื่อระยะห่างระหว่างสถานีเพิ่มขึ้น ความแม่นยำจะลดลง เพื่อเพิ่มความแม่นยำในการวัด เวลาในการสังเกตจะเพิ่มขึ้น ซึ่งอาจเปลี่ยนแปลงได้ตั้งแต่หลายนาทีไปจนถึงหลายชั่วโมง ความแม่นยำของตำแหน่งที่แตกต่างกันคือ 1 -5 ม.
ข้าว. 11.8. สาระสำคัญของวิธีการกำหนดตำแหน่งแบบดิฟเฟอเรนเชียล
ในการแก้ปัญหาจีโอเดติก เมื่อจำเป็นต้องได้รับพิกัดของจุดที่มีความแม่นยำสูง จะใช้การวัดสัมพัทธ์ ซึ่งระยะทางถึงดาวเทียมถูกกำหนดโดยวิธีเฟส และพิกัดที่เพิ่มขึ้นหรือ
เวกเตอร์ระหว่างสถานีที่ติดตั้งเครื่องรับสัญญาณดาวเทียม
การวัดสัมพัทธ์มีสองวิธีหลัก: แบบคงที่และแบบจลนศาสตร์
สำหรับการวางตำแหน่งแบบคงที่ เช่นเดียวกับการวัดส่วนต่าง เครื่องรับจะทำงานพร้อมกันที่สถานีสองแห่ง - สถานีฐานที่มีพิกัดที่ทราบและสถานีที่กำหนด
หลังจากการวัดเสร็จสิ้น ข้อมูลที่รวบรวมโดยตัวรับสัญญาณทั้งสองจะถูกประมวลผลร่วมกัน ความแม่นยำของวิธีการขึ้นอยู่กับระยะเวลาในการวัดซึ่งเลือกตามระยะห่างระหว่างจุดต่างๆ เครื่องรับสมัยใหม่ทำให้สามารถบรรลุความแม่นยำในการกำหนดพิกัดแผน (5-10 มม.) + 1-2 มม. / กม. พิกัดระดับความสูง - ต่ำกว่า 2-3 เท่า
การวัดจลนศาสตร์ช่วยให้คุณได้รับพิกัดของจุดบนพื้นผิวโลกในระยะเวลาอันสั้น ในกรณีนี้ ขั้นแรก พิกัดของจุดแรกถูกกำหนดในลักษณะคงที่ นั่นคือ สถานีเคลื่อนที่เชื่อมโยงกับฐานหนึ่ง เรียกว่าการเริ่มต้น จากนั้นโดยไม่รบกวนการวัด เครื่องรับเคลื่อนที่จะถูกติดตั้งสลับกันที่ คะแนนที่สอง สาม ฯลฯ สำหรับการควบคุม การวัดจะเสร็จสิ้นที่จุดแรกหรือจุดที่มีพิกัดที่ทราบ ซึ่งเป็นที่ที่มีการสังเกตแบบคงที่ ความแม่นยำของวิธีจลนศาสตร์อยู่ที่แผน 2-3 ซม. และสูง 6-8 ซม.
หากมีสถานีวิทยุดิจิทัลและสามารถส่งข้อมูลจากเครื่องรับฐานไปยังสถานีเคลื่อนที่ในระหว่างกระบวนการวัดได้ จะได้พิกัดเป็น แบบเรียลไทม์คือตรงจุดที่กำหนด
วิธีการสำรวจหลักโดยใช้เครื่องมือภูมิสารสนเทศด้วยดาวเทียมแสดงไว้ในตารางที่ 1 11.4.
ตารางที่ 11.4 |
||||
พารามิเตอร์ที่แสดงลักษณะความแม่นยำของการกำหนดตำแหน่ง |
||||
โหมดการวัด |
อุปกรณ์ |
|||
ความถี่คู่ |
ความถี่เดียว |
|||
คงที่อย่างรวดเร็ว |
||||
อาชีพใหม่ |
||||
จลนศาสตร์และจลนศาสตร์ |
||||
แบบเรียลไทม์ |
||||
หยุด-ไป |
||||
อุปกรณ์รับสัญญาณดาวเทียม
อุปกรณ์ดาวเทียมสำหรับการตรวจวัดปัจจุบันผลิตโดยผู้ผลิตมากกว่า 50 ราย ประเทศต่างๆสันติภาพรากฐาน

ไวต่อการถูกโจมตี การระบุพิกัดที่มีความแม่นยำสูงทำให้สามารถใช้วิธีดาวเทียมเพื่อแก้ไขปัญหาเชิงภูมิศาสตร์ที่หลากหลายได้สำเร็จ
การผลิตการสำรวจภูมิประเทศโดยใช้ระบบกำหนดตำแหน่งด้วยดาวเทียม
การสำรวจภูมิประเทศโดยใช้เครื่องรับสัญญาณดาวเทียมจีโอเดติกนั้นดำเนินการในสามขั้นตอน: งานเตรียมการ การสร้างเหตุผลในการสำรวจจีโอเดติก และการสำรวจเอง
ในระหว่าง งานเตรียมการเลือกสถานที่เพื่อกำหนดจุดเหตุผลในการสำรวจในลักษณะที่ไม่มีการรบกวนจากสิ่งก่อสร้างใกล้เคียง มงกุฎของต้นไม้สูง หรือแหล่งกำเนิดคลื่นวิทยุที่มีกำลังแรง นอกจากนี้ยังให้ความสนใจเป็นพิเศษกับการสังเกตการวางแผนซึ่งมีการใช้โมดูลพิเศษ ซอฟต์แวร์เครื่องรับสัญญาณดาวเทียม โมดูลนี้ช่วยให้คุณได้รับคุณลักษณะของกระบวนการกำหนดตำแหน่ง ณ เวลาใดก็ได้ ดังนั้นจึงเลือกช่วงเวลาที่เหมาะสมที่สุดสำหรับการดำเนินการวัดได้
การกำหนดพิกัดของจุด เหตุผลในการสำรวจจีโอเดติกดำเนินการโดยวิธีการสังเกตด้วยดาวเทียมแบบคงที่ วิธีคงที่เป็นวิธีการที่เชื่อถือได้และแม่นยำที่สุด ซึ่งช่วยให้ทราบความแตกต่างในพิกัดของจุดที่อยู่ติดกันด้วยความแม่นยำระดับมิลลิเมตร เครื่องรับตัวหนึ่งเรียกว่าฐานหนึ่ง (รูปที่ 11.10, a) ติดตั้งบนขาตั้งกล้องเหนือจุดเริ่มต้นพร้อมพิกัดที่รู้จัก (จุดของเครือข่าย geodetic ของรัฐ, เครือข่ายควบแน่น geodetic) และตัวที่สองเรียกว่ามือถือ มีการติดตั้งสลับกัน ณ จุดสำรวจโครงข่าย ในกรณีนี้ จะต้องมั่นใจในเงื่อนไขสำหรับการวัดแบบซิงโครนัสโดยฐานและตัวรับสัญญาณมือถือ เวลาในการสังเกตจะถูกเลือกขึ้นอยู่กับความยาวของเส้นฐาน จำนวนดาวเทียมที่สังเกตได้พร้อมกัน ประเภทของอุปกรณ์ดาวเทียมที่ใช้ และเงื่อนไขในการสังเกต เมื่อพิจารณาปัจจัยที่ระบุไว้ทั้งหมด เวลาในการวัดสำหรับแต่ละเส้นพื้นฐานอาจอยู่ในช่วงตั้งแต่ 15-20 นาทีถึง 2.5-3 ชั่วโมง การทำงานร่วมกับเครื่องรับแต่ละเครื่องที่สถานีประกอบด้วย: การวางเครื่องรับไว้ตรงกลางจุดโดยใช้ด้ายหรือเส้นดิ่งแบบออพติคัล การวัดความสูงของเสาอากาศโดยใช้ไม้เท้าแบบแบ่งส่วน และการเปิดเครื่องรับ เมื่อทำการวัดในโหมดคงที่ ไม่ต้องดำเนินการใดๆ ระหว่างการทำงาน เครื่องรับจะทดสอบ ค้นหา และรับดาวเทียมที่มีอยู่ทั้งหมด ทำการวัดค่า GPS และจัดเก็บข้อมูลทั้งหมดไว้ในหน่วยความจำโดยอัตโนมัติ หลังจากผ่านไปตามระยะเวลาการสังเกตที่ต้องการแล้ว เครื่องรับมือถือ
zzo จะถูกถ่ายโอนไปยังจุดที่กำหนดถัดไป หลังสำเร็จการศึกษา
การวัดผลลัพธ์จะได้รับการประมวลผลซึ่งรวมถึงการคำนวณความยาวของเส้นฐานและพิกัดของจุดเหตุผลในระบบพิกัด WGS-84 เป็นต้น ความแม่นยำในการกำหนดตำแหน่งที่วางแผนไว้ของจุดโดยวิธีคงที่ถึง (5-10 มม. ) - I - ระดับความสูง 1-2 มม. / กม. - ต่ำกว่า 2-3 เท่า
ก - การสังเกตดาวเทียมเชิงสถิติ ณ จุดนั้น b - การวัดดาวเทียมจลนศาสตร์ที่จุดรั้ว
การสำรวจภูมิประเทศภูมิประเทศจะดำเนินการผ่านการวัดด้วยดาวเทียมจลนศาสตร์ ซึ่งทำให้สามารถรับพิกัดและความสูงของจุดต่างๆ ได้ในระยะเวลาอันสั้น ในการดำเนินการนี้ มีการติดตั้งตัวรับสัญญาณพื้นฐานบนขาตั้งกล้องไว้ที่จุดเหตุผลในการถ่ายภาพ และติดตั้งตัวรับแบบเคลื่อนที่ทีละตัวที่จุดที่กำลังถ่ายทำ และเครื่องรับพร้อมกับแหล่งพลังงานจะอยู่ในกระเป๋าเป้สะพายหลังแบบพิเศษ และ เสาอากาศรับสัญญาณและตัวควบคุมซึ่งควบคุมกระบวนการถ่ายภาพจะติดตั้งอยู่บนเสา (รูปที่ 11.10, b) ขั้นแรกให้ดำเนินการเริ่มต้น - เชื่อมโยงสถานีเคลื่อนที่เข้ากับฐานซึ่งการวัดที่จุดแรกจะดำเนินการนานกว่าเล็กน้อย (20 -30 วินาที) กว่าที่จุดถัดไป หลังจากติดตั้งเสาโดยมีเสาอากาศตรงจุดและตั้งค่าพารามิเตอร์ที่จำเป็นทั้งหมดในคอนโทรลเลอร์ (ความสูงในการติดตั้งเสาอากาศบนเสา, จำนวนรั้ว, คุณลักษณะเช่น: มุมรั้ว, ท่อระบายน้ำ ฯลฯ ) พวกเขาเริ่มยิงโดยควบคุมแนวตั้งของเสาตามแนวระดับฟอง โดยปกติเวลาในการสังเกตที่จุดหนึ่งจะไม่เกิน 5-10 วินาที หลังจากนั้นการวัดจะหยุดลง และจะย้ายไปยังจุดถัดไปโดยไม่ต้องปิดเครื่องรับ หากจุดที่กำลังถ่ายภาพอยู่ผิดทิศทาง
ในบริเวณใกล้เคียงกับอาคาร ต้นไม้สูง และวัตถุอื่นๆ ที่บดบังการมองเห็นของดาวเทียม ควรเพิ่มเวลาในการวัด นอกจากนี้ การวัดที่จุดดังกล่าวสามารถทำซ้ำได้โดยการกลับมาที่จุดเหล่านั้นอีกครั้ง การสำรวจพื้นที่เสร็จสิ้นด้วยการสังเกต ณ จุดแรกหรือจุดที่มีพิกัดที่ทราบ หลังจากเสร็จสิ้นการสำรวจ ผลลัพธ์จะถูกประมวลผลในลักษณะเดียวกับในกรณีของการวัดแบบคงที่ ความแม่นยำของวิธีการวัดจลนศาสตร์อยู่ที่แผน 2-3 ซม. และสูง 6-8 ซม. ผลการวัดสามารถนำเสนอได้ทั้งแบบดิจิทัลและกราฟิก