การออกแบบมอเตอร์แบบอะซิงโครนัส การออกแบบมอเตอร์แบบอะซิงโครนัสกับโรเตอร์แบบกรงกระรอก ค่าสัมประสิทธิ์การนำแม่เหล็กของการกระเจิงที่แตกต่างกันของขดลวดสเตเตอร์โดยคำนึงถึงผลกระทบของความอิ่มตัว
กระทรวงศึกษาธิการและวิทยาศาสตร์
สาธารณรัฐคาซัคสถาน
คาซัคสถานเหนือ มหาวิทยาลัยของรัฐพวกเขา. ม. โคซีบาเยวา
คณะพลังงานและวิศวกรรมเครื่องกล
ภาควิชาวิศวกรรมพลังงานและเครื่องมือวัด
งานหลักสูตร
ในหัวข้อ: "การออกแบบมอเตอร์แบบอะซิงโครนัสด้วยโรเตอร์กรงกระรอก"
ระเบียบวินัย - "เครื่องจักรไฟฟ้า"
สร้างโดย Kalantyrev
ผู้อำนวยการวิทยาศาสตร์
ด.ต.ศ. เอ็น.วี. แชตคอฟสกายา
เปโตรปาฟลอฟสค์ 2010
การแนะนำ
1. การเลือกขนาดหลัก
2. การกำหนดจำนวนช่องสเตเตอร์, หมุนในเฟสที่คดเคี้ยวของส่วนลวดของสเตเตอร์ที่คดเคี้ยว
3. การคำนวณขนาดของโซนฟันของสเตเตอร์และช่องว่างอากาศ
4. การคำนวณโรเตอร์
5. การคำนวณวงจรแม่เหล็ก
6. พารามิเตอร์โหมดการทำงาน
7. การคำนวณการสูญเสีย
8. การคำนวณประสิทธิภาพ
9. การคำนวณความร้อน
10. การคำนวณประสิทธิภาพของแผนภูมิวงกลม
ภาคผนวก ก
บทสรุป
บรรณานุกรม
การแนะนำ
มอเตอร์แบบอะซิงโครนัสเป็นตัวแปลงพลังงานไฟฟ้าหลักเป็นพลังงานกลและเป็นพื้นฐานของไดรฟ์ไฟฟ้าของกลไกส่วนใหญ่ ซีรีส์ 4A ครอบคลุมช่วงพิกัดพลังงานตั้งแต่ 0.06 ถึง 400 กิโลวัตต์ และมีความสูง 17 แกนตั้งแต่ 50 ถึง 355 มม.
ในโครงการหลักสูตรนี้ มีการพิจารณาเครื่องยนต์ต่อไปนี้:
การดำเนินการตามระดับการป้องกัน: IP23;
วิธีทำความเย็น: IC0141
ออกแบบตามวิธีการติดตั้ง: IM1081 - ตามตัวเลขตัวแรก - มอเตอร์ที่ขาพร้อมที่บังปลาย ตามตัวเลขที่สองและสาม - มีเพลาแนวนอนและอุ้งเท้าล่าง บนหลักที่สี่ - ด้วยปลายเพลาทรงกระบอกด้านหนึ่ง
สภาพการทำงานทางภูมิอากาศ: U3 - ตามตัวอักษร - สำหรับสภาพอากาศอบอุ่น ตามรูป - สำหรับการจัดวางในพื้นที่ปิดที่มีการระบายอากาศตามธรรมชาติโดยไม่มีสภาพอากาศที่ควบคุมโดยเทียม ซึ่งความผันผวนของอุณหภูมิและความชื้น การสัมผัสกับทรายและฝุ่นละออง การแผ่รังสีจากแสงอาทิตย์จะน้อยกว่าใน กลางแจ้งหิน คอนกรีต ไม้ และสถานที่ที่ไม่มีเครื่องทำความร้อนอื่นๆ
1. การเลือกขนาดหลัก
1.1 กำหนดจำนวนเสาคู่:
(1.1)แล้วจำนวนเสา
.1.2 กำหนดความสูงของแกนหมุนแบบกราฟิก: ตามรูปที่ 9.18, b
ตาม ตามตาราง 9.8 เรากำหนดเส้นผ่านศูนย์กลางภายนอกที่สอดคล้องกับแกนหมุน1.3 เส้นผ่านศูนย์กลางภายในสเตเตอร์
เราคำนวณตามสูตร: , (1.2) - ค่าสัมประสิทธิ์ที่กำหนดตามตาราง 9.9 อยู่ในช่วงเวลา: .เลือกค่า
, แล้ว1.4 กำหนดการแบ่งเสา
: (1.3)1.5 กำหนดกำลังที่คำนวณได้
, W: , (1.4) – เปิดเพลามอเตอร์, W; - อัตราส่วนของ EMF ของสเตเตอร์ที่คดเคี้ยวกับแรงดันไฟฟ้าที่กำหนดซึ่งสามารถกำหนดโดยประมาณได้จากรูปที่ 9.20 สำหรับ และ , .ค่าโดยประมาณ
และขับไปตามทางโค้งที่สร้างขึ้นตามข้อมูลของเครื่องยนต์ซีรีส์ 4A รูปที่ 9.21 ค. ที่กิโลวัตต์ และ , , และ1.6 โหลดแม่เหล็กไฟฟ้า A และ Bd ถูกกำหนดแบบกราฟิกจากเส้นโค้งในรูปที่ 9.23, b. ที่
กิโลวัตต์ และ , , Tl1.7 อัตราส่วนที่คดเคี้ยว
. สำหรับขดลวดสองชั้นที่มี2р>2 ควรใช้ = 0.91–0.92 ยอมรับกันเถอะ .1.8 กำหนดความเร็วเชิงมุมซิงโครนัสของเพลามอเตอร์ W:
, (1.5) – ความเร็วซิงโครนัส1.9 คำนวณความยาวของช่องว่างอากาศ
:, (1.6) คือค่าสัมประสิทธิ์รูปร่างของสนาม .
1.10 เกณฑ์สำหรับการเลือกที่ถูกต้องของมิติข้อมูลหลัก D และ
เป็นอัตราส่วน ซึ่งควรอยู่ในขอบเขตที่อนุญาต รูปที่ 9.25, ข. . ค่าของ l อยู่ภายในขีดจำกัดที่แนะนำ ซึ่งหมายความว่ามิติหลักได้รับการกำหนดอย่างถูกต้อง2. การกำหนดจำนวนช่องสเตเตอร์, การหมุนเฟสของขดลวดและส่วนตัดขวางของลวดสเตเตอร์ที่คดเคี้ยว
2.1 กำหนดค่าขีดจำกัด: t 1 max และ t 1 min รูปที่ 9.26 ที่
และ , , .2.2 จำนวนช่องสเตเตอร์:
, (2.1) (2.2)สุดท้าย จำนวนสล็อตต้องเป็นจำนวนหลายเท่าของจำนวนสล็อตต่อเสาและเฟส: q ยอมรับ
, แล้ว, (2.3)
โดยที่ m คือจำนวนเฟส
2.3 ในที่สุดเราจะกำหนดส่วนฟันของสเตเตอร์:
(2.4)2.4 กระแสเบื้องต้นของขดลวดสเตเตอร์
(2.5)2.5 จำนวนตัวนำที่มีประสิทธิภาพในช่องเสียบ (สมมติว่า
0โครงการหลักสูตร
ในวินัย "เครื่องจักรไฟฟ้า"
การออกแบบมอเตอร์แบบอะซิงโครนัสพร้อมโรเตอร์แบบพ่นปิด
บันทึกอธิบาย
คำอธิบายประกอบ
ใน บันทึกอธิบายในโครงการหลักสูตรในสาขาวิชา "เครื่องกลไฟฟ้า" การคำนวณแม่เหล็กไฟฟ้า ความร้อน และการระบายอากาศของมอเตอร์แบบอะซิงโครนัสสามเฟสหกขั้วพร้อมโรเตอร์กรงกระรอกที่มีกำลังสุทธิ 2.2 กิโลวัตต์สำหรับแรงดันไฟหลัก 220/380 V ถูกนำเสนอ.
การคำนวณมอเตอร์แบบอะซิงโครนัสดำเนินการด้วยตนเองและใช้คอมพิวเตอร์ ผลจากการออกแบบเครื่องยนต์ ทำให้ได้รูปแบบการออกแบบที่ตรงตามข้อกำหนด เงื่อนไขการอ้างอิง.
สำหรับมอเตอร์แบบอะซิงโครนัสที่ออกแบบไว้ จะมีการคำนวณเชิงกลของเพลาและเลือกตลับลูกปืน กำหนดขนาดขององค์ประกอบโครงสร้างเครื่องยนต์
บันทึกอธิบายประกอบด้วยข้อความพิมพ์ดีด 63 แผ่น รวมถึงตัวเลข 4 รูป ตาราง 2 ตาราง และรายการอ้างอิงจาก 3 ชื่อเรื่อง
บทนำ……………………………………………………………….…………....5
1 ทางเลือกของขนาดหลัก…………………………………………………………………………………………………………………………… …………………………………………………………………………………………………… …………………………………….
2 การกำหนดพารามิเตอร์ของสเตเตอร์การคำนวณขดลวดและขนาดของโซนฟันของสเตเตอร์ ………………………………………………………………………… …..….9
3 การเลือกช่องว่างอากาศ………………………………………………………….17
4 การคำนวณโรเตอร์กรงกระรอก……………….....………………………..18
5 การคำนวณวงจรแม่เหล็ก……………………………….……………………...22
6 พารามิเตอร์โหมดการทำงาน…………………………………………………..27
7 การคำนวณการสูญเสียพลังงานในโหมดว่าง….…..………………...34
8 การคำนวณผลงาน………………………………………….…..…38
9 การคำนวณลักษณะเริ่มต้น……………………………………………….....45
10 การคำนวณความร้อนและการระบายอากาศ………………………………………..…..55
11 การออกแบบเครื่องยนต์…………………………………………………..60
สรุป…………………………………………….…………………………….62
รายชื่อแหล่งที่ใช้……………………………………........................63
การแนะนำ
มอเตอร์อะซิงโครนัสเป็นมอเตอร์หลักในไดรฟ์ไฟฟ้าขององค์กรอุตสาหกรรมเกือบทั้งหมด ในสหภาพโซเวียต ผลผลิตของมอเตอร์อะซิงโครนัสเกิน 10 ล้านหน่วยต่อปี มอเตอร์ที่พบมากที่สุดสำหรับแรงดันไฟฟ้าสูงสุด 660 V กำลังไฟที่ติดตั้งทั้งหมดประมาณ 200 ล้านกิโลวัตต์
เครื่องยนต์ซีรีส์ 4A ถูกผลิตในปริมาณมากในช่วงทศวรรษที่ 80 ของศตวรรษที่ XX และกำลังใช้งานอยู่ในปัจจุบัน ในเกือบทั้งหมด สถานประกอบการอุตสาหกรรมรัสเซีย. ซีรีส์นี้ครอบคลุมช่วงกำลังตั้งแต่ 0.6 ถึง 400 กิโลวัตต์ และสร้างขึ้นในความสูงของเพลามาตรฐาน 17 แบบตั้งแต่ 50 ถึง 355 มม. ซีรีส์นี้ประกอบด้วยเครื่องยนต์เวอร์ชันพื้นฐาน การดัดแปลงจำนวนหนึ่ง และเวอร์ชันพิเศษ เอ็นจิ้นการออกแบบพื้นฐานได้รับการออกแบบมาสำหรับ สภาวะปกติทำงานและเป็นเครื่องยนต์เอนกประสงค์ เหล่านี้เป็นมอเตอร์แบบอะซิงโครนัสสามเฟสที่มีโรเตอร์แบบกรงกระรอก ซึ่งออกแบบมาสำหรับความถี่หลักที่ 50 Hz ได้รับการออกแบบตามระดับการป้องกัน IP44 ในช่วงความสูงทั้งหมดของแกนหมุนและ IP23 ในช่วงความสูงของแกนการหมุน 160…355 มม.
การดัดแปลงและเครื่องยนต์เวอร์ชันพิเศษนั้นสร้างขึ้นจากเวอร์ชันหลักและมีโซลูชันการออกแบบพื้นฐานที่เหมือนกันสำหรับองค์ประกอบหลัก มอเตอร์ดังกล่าวผลิตขึ้นในส่วนต่างๆ ของซีรีส์ที่ความสูงระดับหนึ่งของแกนหมุน และมีไว้สำหรับใช้เป็นกลไกขับเคลื่อนที่กำหนดข้อกำหนดเฉพาะสำหรับมอเตอร์หรือทำงานในสภาวะที่แตกต่างจากปกติในแง่ของอุณหภูมิหรือความสะอาด . สิ่งแวดล้อม.
การดัดแปลงทางไฟฟ้าของมอเตอร์ซีรีส์ 4A รวมถึงมอเตอร์ที่มีพิกัดสลิปเพิ่มขึ้น แรงบิดเริ่มต้นเพิ่มขึ้น ความเร็วหลายระดับ ความถี่กำลัง 60 Hz การปรับเปลี่ยนการออกแบบรวมถึงมอเตอร์ที่มีเฟสโรเตอร์พร้อมเบรกแม่เหล็กไฟฟ้าในตัว เสียงรบกวนต่ำ พร้อมการป้องกันอุณหภูมิในตัว
ตามสภาพแวดล้อมมีการดัดแปลงเครื่องยนต์ของการออกแบบในเขตร้อน, ทนความชื้น, ทนสารเคมี, กันฝุ่นและเกษตรกรรม
มอเตอร์ยกควบคุมด้วยความถี่ ความแม่นยำสูง มีการออกแบบเฉพาะ
มอเตอร์ส่วนใหญ่ของซีรีย์ 4A มีระดับการป้องกัน IP44 และผลิตในการออกแบบที่เกี่ยวข้องกับกลุ่ม IM1 เช่น มีเพลาแนวนอน, ที่เท้า, พร้อมตัวป้องกันสองด้าน ตัวเรือนเครื่องยนต์ทำด้วยซี่โครงแนวรัศมีตามยาว ซึ่งเพิ่มพื้นผิวระบายความร้อนและปรับปรุงการระบายความร้อนจากเครื่องยนต์ไปยังอากาศโดยรอบ ที่ปลายด้านตรงข้ามของเพลาจากปลายการทำงาน พัดลมจะติดตั้งอยู่ ซึ่งจะขับเคลื่อนอากาศเย็นไปตามซี่โครงของตัวเครื่อง พัดลมปิดด้วยปลอกที่มีรูให้อากาศผ่าน
แกนแม่เหล็กของมอเตอร์เคลือบด้วยแผ่นเหล็กไฟฟ้าหนา 0.5 มม. และมอเตอร์ที่มี h = 50 ... 250 มม. ทำจากเหล็กเกรด 2013 และมอเตอร์ที่มี h = 280 ...
ในเครื่องยนต์ทั้งหมดของซีรีส์ด้วย h< 280 мм и в двигателях с 2p = 10 и 12 всех высот оси вращения обмотка статора выполнена из круглого провода и пазы статора полузакрытые. При h = 280…355 мм, кроме двигателей с 2p = 10 и 12, катушки обмотки статора намотаны прямоугольным проводом, подразделенные и пазы статора полуоткрытые.
ขดลวดของใบพัดและวงแหวนของกรงกระรอกเป็นอะลูมิเนียมหล่อ ใบพัดระบายอากาศบนวงแหวนโรเตอร์ทำหน้าที่ช่วยถ่ายเทอากาศภายในเครื่อง
โล่แบริ่งติดอยู่กับตัวเครื่องด้วยสลักเกลียวสี่หรือหกตัว
กล่องขั้วต่ออยู่ที่ด้านบนของโครงซึ่งทำให้ง่ายขึ้น งานติดตั้งเมื่อเชื่อมต่อมอเตอร์เข้ากับแหล่งจ่ายไฟหลัก
1 ทางเลือกของมิติข้อมูลหลัก
ตามข้อกำหนดของเอกสารข้อมูลจำเพาะทางเทคนิค เราเลือกเครื่องยนต์ซีรีส์ 4А100S6У3 ตามภาคผนวก A /1/ เป็นพื้นฐาน การป้องกัน IP54 วิธีการระบายความร้อน ICO141 การออกแบบ IM1001 กำลังเครื่องยนต์ 2.2 กิโลวัตต์, 2p = 6, f = 60 Hz, U 1n = 230/400 V.
คะแนนมอเตอร์พื้นฐาน:
; ; η= 81%; ; ชั่วโมง = 100 มม.
ขึ้นอยู่กับความสูงของแกนหมุน เราเลือกเส้นผ่านศูนย์กลางภายนอกของแกนสเตเตอร์ตามตาราง 2.1 /1/
ค่าของเส้นผ่านศูนย์กลางของพื้นผิวด้านในของสเตเตอร์ถูกกำหนดโดยเส้นผ่านศูนย์กลางภายนอกของแกนสเตเตอร์และค่าสัมประสิทธิ์ k dเท่ากับอัตราส่วนของเส้นผ่านศูนย์กลางภายในกับภายนอก ค่าสัมประสิทธิ์ k dขึ้นอยู่กับจำนวนเสา เราเลือกจากตาราง 2.2 ล่วงหน้า k d =0,70 .
เส้นผ่านศูนย์กลางภายในสเตเตอร์:
โดยที่ k d คืออัตราส่วนของเส้นผ่านศูนย์กลางภายในและภายนอกของแกนสเตเตอร์
D \u003d 0.70 0.168 \u003d 0.118m.
การแบ่งเสา:
โดยที่ p คือจำนวนคู่ของเสา
กำลังเครื่องโดยประมาณ:
กำลังของเพลามอเตอร์อยู่ที่ไหน
เรายอมรับอัตราส่วนของ EMF ของสเตเตอร์ที่คดเคี้ยวกับแรงดันไฟฟ้าที่กำหนด = 0.948;
ประสิทธิภาพของเครื่องยนต์
ตัวประกอบกำลัง
เรายอมรับโหลดแม่เหล็กไฟฟ้าล่วงหน้า:
A \u003d 25 10 3 A / ม.; B δ = 0.88 ต.
ค่าสัมประสิทธิ์การม้วนเป็นค่าเบื้องต้นสำหรับขดลวดชั้นเดียว = 0.96
ปัจจัยรูปร่างฟิลด์:
ความยาวโดยประมาณของเครื่อง m:
การเหนี่ยวนำแม่เหล็กในช่องว่างอากาศ, T;
อัตราส่วนอยู่ในขอบเขตที่ยอมรับได้
2 การกำหนดจำนวนช่องและประเภทของขดลวดสเตเตอร์ การคำนวณขดลวดและขนาดของโซนฟันของสเตเตอร์
การกำหนดขนาดของโซนฟันของสเตเตอร์เริ่มต้นด้วยการเลือกจำนวนช่อง Z 1 . จำนวนช่องสเตเตอร์มีผลไม่ชัดเจนต่อประสิทธิภาพทางเทคนิคและเศรษฐกิจของเครื่อง หากคุณเพิ่มจำนวนช่องสเตเตอร์ รูปร่างของเส้นโค้ง EMF และการกระจายของสนามแม่เหล็กในช่องว่างอากาศจะดีขึ้น ในเวลาเดียวกันความกว้างของร่องและฟันลดลงซึ่งนำไปสู่การลดลงของปัจจัยการอุดของร่องด้วยทองแดงและในเครื่องจักรที่ใช้พลังงานต่ำอาจทำให้ความแข็งแรงเชิงกลของฟันลดลงอย่างไม่สามารถยอมรับได้ การเพิ่มจำนวนของช่องสเตเตอร์จะเพิ่มความซับซ้อนของงานม้วน เพิ่มความซับซ้อนของดาย และความทนทานลดลง
การเลือกจำนวนช่องสเตเตอร์ตามรูปที่ 3.1 /1/ เรากำหนดค่าขอบเขตของการแบ่งฟัน t z 1 max = 0.012 m; t z 1 นาที \u003d 0.008 ม.
จำนวนช่องสเตเตอร์:
โดยที่ - ค่าต่ำสุดของการแบ่งฟันของสเตเตอร์ m;
ค่าสูงสุดของการแบ่งฟันของสเตเตอร์ m;
จากช่วงค่าที่เป็นผลลัพธ์ ให้เลือกจำนวนช่องสเตเตอร์
จำนวนช่องเสียบต่อเสาและเฟส:
โดยที่ m คือจำนวนเฟส
การแบ่งฟันของสเตเตอร์ถือเป็นที่สิ้นสุด:
จัดอันดับสเตเตอร์ที่คดเคี้ยวในปัจจุบัน:
แรงดันไฟฟ้าของมอเตอร์อยู่ที่ไหน V;
จำนวนตัวนำที่มีประสิทธิภาพในช่องเสียบ:
เรายอมรับจำนวนสาขาคู่ขนาน a \u003d 1 จากนั้น U p \u003d 48 เพราะ คดเคี้ยวเป็นชั้นเดียว
จำนวนรอบต่อเฟส:
เราเลือกขดลวดศูนย์กลางชั้นเดียว สเตเตอร์ที่คดเคี้ยวนั้นดำเนินการเป็นจำนวนมากจากลวดของส่วนตัดขวาง
ค่าสัมประสิทธิ์การกระจาย:
อัตราส่วนการม้วน:
k ob1 = k y ∙k p ; (2.9)
โดยที่ k y คือตัวประกอบการทำให้สั้นลงของระยะพิทช์ที่คดเคี้ยวของสเตเตอร์, k y =1;
k ob1 =1∙0.966=0.966
แผนภาพที่คดเคี้ยวแสดงในรูปที่ 1
รูปที่ 1 - รูปแบบของขดลวดสามเฟสแบบชั้นเดียวที่มี z 1 =36, m 1 =3, 2p=6, a 1 =1, q 1 =2
ฟลักซ์แม่เหล็กในช่องว่างอากาศของเครื่อง:
การเหนี่ยวนำแม่เหล็กที่บริสุทธิ์ในช่องว่างอากาศ:
ก่อนหน้านี้สำหรับ D a \u003d 0.168 m เรายอมรับ \u003d 182 10 9
ความหนาแน่นกระแสในขดลวดสเตเตอร์:
ผลคูณของโหลดเชิงเส้นและความหนาแน่นกระแสอยู่ที่ไหน ;
พื้นที่หน้าตัดของตัวนำที่มีประสิทธิภาพ ก่อน:
เรายอมรับลวดม้วนของแบรนด์ PETV: d el \u003d 0.95 mm, d of \u003d 1.016 mm, q el \u003d 0.706 mm 2
เรายอมรับล่วงหน้าสำหรับ 2p = 6 B’ z 1 = 1.9 T; B 'a \u003d 1.55 ต.
ตามตาราง 3.2 /1/ สำหรับเกรดเหล็กออกซิไดซ์ 2013 เรายอมรับ
ความกว้างของฟันสเตเตอร์เบื้องต้น:
ปัจจัยการบรรจุของบรรจุภัณฑ์ด้วยเหล็กอยู่ที่ไหน
ค่าเบื้องต้นของความสูงของสเตเตอร์แอก:
เราใช้ขนาดของร่องในตราประทับ b w = 3.0 มม. ชั่วโมง ก = 0.5 มม.; β = 45˚
ค่าเบื้องต้นของความสูงของช่องสเตเตอร์:
ขนาดช่องสเตเตอร์:
ความสูงของช่องอยู่ที่ไหน m;
- ความกว้างของช่อง m;
ค่าที่ถูกต้องของความสูงของช่องสเตเตอร์:
เรายอมรับ = 0.1 มม. และ = 0.2 มม.
ขนาดร่องในที่โล่งโดยคำนึงถึงค่าเผื่อการประกอบ:
ที่ไหน - ค่าเผื่อความกว้างของร่อง ม.
ที่ไหน - ค่าเผื่อความสูง mm;
พื้นที่หน้าตัดของฉนวนสล็อต:
ความหนาของฉนวนอยู่ที่ไหน mm;
S ออก \u003d 0.25 ∙ 10 -3 ∙ (2 ∙ 1.37 ∙ 10 -2 + 7.8 ∙ 10 -3 + 5.9 ∙ 10 - 3) \u003d 1.032 ∙ 10 -5 ม. 2
พื้นที่ว่างของร่อง:
เกณฑ์สำหรับการประเมินผลการเลือกขนาดของร่องคือค่าของปัจจัยการเติมของพื้นที่ว่างของร่องด้วยลวดที่คดเคี้ยว:
โดยที่เส้นผ่านศูนย์กลางของลวดฉนวนคือ mm;
ค่าที่ได้รับของปัจจัยเติมเป็นที่ยอมรับสำหรับการวางขดลวดของยานยนต์
ค่าความกว้างของฟันที่แก้ไขแล้ว:
ความกว้างของฟันสเตเตอร์เฉลี่ย:
ค่าที่คำนวณได้ของความกว้างฟันของสเตเตอร์:
ความสูงของฟันสเตเตอร์โดยประมาณ:
ค่าที่ถูกต้องของความสูงของสเตเตอร์แอก:
3 การเลือกช่องว่างอากาศ
สำหรับมอเตอร์ที่มีกำลังน้อยกว่า 20 กิโลวัตต์ ขนาดของช่องว่างอากาศหาได้จากสูตร 3.1
ลองปัดเศษค่าขึ้นเป็น 0.05 มม. δ=0.35 มม.
4 การคำนวณโรเตอร์กรงกระรอก
สำหรับ 2p = 6 และ Z 1 = 36 เราเลือกจำนวนช่องโรเตอร์ Z 2 = 28
เส้นผ่านศูนย์กลางภายนอกของโรเตอร์:
D 2 \u003d 0.118 - 2 ∙ 0.35 ∙ 10 -3 \u003d 0.1173 ม.
ส่วนฟันของโรเตอร์:
สำหรับ 2p = 6 และ h = 100 mm เราใช้ K B = 0.23
เพราะ เรามี 2.2 กิโลวัตต์< 100 кВт, то сердечник ротора непосредственно насаивают на вал без промежуточной втулки. Применим горячую посадку сердечника на гладкий вал без шпонки.
ด้วยการออกแบบโรเตอร์นี้ เส้นผ่านศูนย์กลางภายในของวงจรแม่เหล็กจะเท่ากับเส้นผ่านศูนย์กลางของเพลา m:
เส้นผ่านศูนย์กลางภายในของโรเตอร์:
d ใน \u003d 0.23 0.168 \u003d 0.0386 ม.
ปัจจัยการลดปัจจุบัน:
อัตราส่วนมุมเอียงของร่องอยู่ที่ไหน
ค่าเอียง: b sk \u003d t 1 \u003d 0.01
มุมเอียงของร่องในส่วนของฟันของโรเตอร์:
มุมตรงกลางของมุมเอียงของร่อง:
อัตราส่วนเอียง:
ค่าเบื้องต้นของกระแสในขดลวดโรเตอร์:
ความหนาแน่นกระแสในแท่งของขดลวดโรเตอร์จะถือว่า J 2 = 3.05∙10 6 A/m 2 .
พื้นที่หน้าตัดของแท่ง:
คิว ค \u003d 255.12 / 3.05 10 6 \u003d 8.36 10 -5 ม. 2
สำหรับโรเตอร์ ให้เลือกช่องแบบครึ่งปิด
ขนาดของร่องในตราประทับ: ยอมรับ b w =1 มม. h w2 = 0.5 มม.
สำหรับ 2p = 6; Bz2 = 1.8 ต
ขนาดช่องโรเตอร์:
ความสูงของช่องอยู่ที่ไหน m;
ความสูงของจัมเปอร์เหนือร่อง m;
ยอมรับ ข 21 = 5.8∙10 -3 ม. ข 22 = 1.6∙10 -3 ม.
ส่วนตอซังที่ผ่านการกลั่นแล้ว:
ความสูงของร่อง mm:
เราระบุความกว้างของฟันของโรเตอร์:
ความกว้างของฟันโดยประมาณ:
กระแสไฟในกรงกระรอก:
พื้นที่หน้าตัดของวงแหวน:
ความสูงของวงแหวนเฉลี่ย:
ความกว้างของแหวนสั้น:
เส้นผ่านศูนย์กลางวงแหวนเฉลี่ย:
5 การคำนวณวงจรแม่เหล็ก
การคำนวณวงจรแม่เหล็กของมอเตอร์เหนี่ยวนำนั้นดำเนินการสำหรับโหมดการทำงานที่กำหนดเพื่อกำหนดแรงแม่เหล็กทั้งหมดที่จำเป็นในการสร้างฟลักซ์แม่เหล็กที่ทำงานในช่องว่างอากาศ
วงจรแม่เหล็กของเครื่องแบ่งออกเป็นห้าส่วนที่มีลักษณะเฉพาะ ได้แก่ ช่องว่างอากาศ ฟันของสเตเตอร์และโรเตอร์ แอกของสเตเตอร์และโรเตอร์ เชื่อกันว่าภายในแต่ละส่วน การเหนี่ยวนำแม่เหล็กมีทิศทางเดียวที่มีลักษณะเฉพาะมากที่สุด การเหนี่ยวนำแม่เหล็กจะถูกกำหนดสำหรับแต่ละส่วนของวงจรแม่เหล็กซึ่งค่าที่กำหนดความแรงของสนามแม่เหล็ก ตามค่าของความแรงของสนามแม่เหล็กในส่วนของวงจรแม่เหล็กและความยาวของเส้นแรงสนามที่สอดคล้องกับส่วนนั้น แรงแม่เหล็กจะถูกกำหนด แรงแม่เหล็กที่ต้องการถูกกำหนดเป็นผลรวมของแรงดึงดูดแม่เหล็กของทุกส่วนของวงจรแม่เหล็ก วงจรแม่เหล็กของเครื่องถือว่าสมมาตร ดังนั้นการคำนวณแรงดึงดูดแม่เหล็กจึงทำขึ้นสำหรับขั้วหนึ่งคู่
ค่าสัมประสิทธิ์คำนึงถึงการเพิ่มขึ้นของความต้านทานแม่เหล็กของช่องว่างอากาศเนื่องจากโครงสร้างเกียร์ของพื้นผิวสเตเตอร์:
ค่าสัมประสิทธิ์คำนึงถึงการเพิ่มขึ้นของความต้านทานแม่เหล็กของช่องว่างอากาศเนื่องจากโครงสร้างเกียร์ของโรเตอร์:
ส่งผลให้ปัจจัยช่องว่างอากาศ:
แรงดันแม่เหล็กช่องว่างอากาศ:
การเหนี่ยวนำโดยประมาณในฟันสเตเตอร์:
การเหนี่ยวนำโดยประมาณในฟันของโรเตอร์:
เราเลือกเกรดเหล็ก - 2013 สำหรับ 1.88 T เราใช้ H z1 \u003d 1970 A / m สำหรับ 1.79 T เราใช้ H z2 \u003d 1480 A / m
แรงดึงแม่เหล็กของโซนฟัน:
ปัจจัยความอิ่มตัวของโซนฟัน:
ค่าสัมประสิทธิ์ความอิ่มตัวของโซนฟันที่ได้รับนั้นอยู่ในขอบเขตที่ยอมรับได้
การเหนี่ยวนำในแอกสเตเตอร์:
ความสูงของโรเตอร์แอก:
เพราะ 2p=6 แล้วความสูงที่คำนวณได้ของแอกโรเตอร์ ชม.’ ก 2 = ฮะ 2 .
สำหรับ 1 \u003d 1.56 T เราใช้ H a 1 \u003d 654 A / m; สำหรับ 2 \u003d 1.06 T เราใช้ H a 2 \u003d 206 A / m
ความยาวของเส้นสนามแม่เหล็กในแอกของสเตเตอร์และโรเตอร์:
แรงดันแม่เหล็กแอกสเตเตอร์:
ความแรงของสนามในแอกสเตเตอร์อยู่ที่ไหน A/m;
แรงดันแม่เหล็กต่อคู่ขั้ว:
ปัจจัยความอิ่มตัวของวงจรแม่เหล็ก:
กระแสแม่เหล็ก:
ค่าสัมพัทธ์ของกระแสแม่เหล็ก:
ปฏิกิริยาการเหนี่ยวนำหลัก:
ที่ไหน อี= เค อี ยูnf\u003d 0.948 ∙ 230 \u003d 218.04 V;
รีแอกแตนซ์อุปนัยหลักในหน่วยสัมพัทธ์:
6 พารามิเตอร์โหมดการทำงาน
6.1 ความต้านทานที่ใช้งานของขดลวดโรเตอร์และสเตเตอร์
ความกว้างของขดลวดสเตเตอร์เฉลี่ย:
การทำให้ระยะพิทช์ของขดลวดสเตเตอร์สั้นลงอยู่ที่ไหน
สำหรับขดลวดสุ่มที่วางอยู่ในร่องก่อนที่จะกดแกนเข้าไปในตัวเรือน ข= 0.01 ม.
สำหรับ 2p = 6 เรายอมรับ
การออกจากส่วนหน้าของขดลวดสเตเตอร์:
ความยาวของส่วนหน้าของขดลวดสเตเตอร์:
ความยาวเฉลี่ยของขดลวดสเตเตอร์:
สำหรับขดลวดสเตเตอร์ที่ทำจากตัวนำทองแดงและอุณหภูมิการออกแบบที่เราใช้
ความต้านทานที่ใช้งานของขดลวดสเตเตอร์:
ความต้านทานเฉพาะของวัสดุที่คดเคี้ยวอยู่ที่ไหนที่อุณหภูมิการออกแบบ ;
สำหรับโรเตอร์แบบกรงกระรอกที่ทำจากอะลูมิเนียมและอุณหภูมิการออกแบบ เราใช้
ความต้านทานที่ใช้งานของแกนหมุนของโรเตอร์:
ที่ไหน เค อาร์- เรายอมรับค่าสัมประสิทธิ์การเพิ่มขึ้นของความต้านทานที่ใช้งานของแท่งเนื่องจากการกระจัดในปัจจุบัน เค อาร์=1 ;
แอลซีต= ล. 2- ความยาวคัน
ความต้านทานของส่วนของวงแหวนปิดที่อยู่ระหว่างแท่งที่อยู่ติดกันสองแท่ง:
ความต้านทานของเฟสโรเตอร์:
ความต้านทานที่ใช้งานของเฟสของขดลวดอลูมิเนียมของโรเตอร์ลดลงตามจำนวนรอบของขดลวดสเตเตอร์:
ค่าสัมประสิทธิ์การลดความต้านทานของโรเตอร์ที่คดเคี้ยวไปที่ขดลวดสเตเตอร์อยู่ที่ไหน
6.2 ปฏิกิริยาการรั่วไหลของมอเตอร์เหนี่ยวนำ
พิทช์คดเคี้ยวสัมพัทธ์ β=1, kβ = k'β = 1.
ค่าสัมประสิทธิ์การนำแม่เหล็กของการรั่วไหลของช่องของขดลวดสเตเตอร์:
ค่าสัมประสิทธิ์การกระเจิงของหน้าผาก:
สำหรับการกำหนดค่าสล็อตสเตเตอร์ที่เลือก:
มุมเอียงของร่องอยู่ที่ไหนซึ่งแสดงเป็นเศษส่วนของส่วนฟันของโรเตอร์ β sc = 0.76;
เค'สก- ค่าสัมประสิทธิ์ขึ้นอยู่กับ ที 2 / ที 1 และ เบต้า Sc, ยอมรับ เค'สก = 1,85;
ตัวเหนี่ยวนำเฟสที่คดเคี้ยวของสเตเตอร์:
ค่าสัมประสิทธิ์การนำแม่เหล็กเฉพาะของการรั่วไหลของช่องโรเตอร์แบบกรงกระรอก:
ค่าสัมประสิทธิ์การนำไฟฟ้าอยู่ที่ไหน
ชม.'sh2= 0;
ค่าสัมประสิทธิ์การนำแม่เหล็กเฉพาะของการกระเจิงด้านหน้าของขดลวดโรเตอร์ลัดวงจร:
ค่าสัมประสิทธิ์การนำแม่เหล็กจำเพาะของการกระเจิงที่แตกต่างกันของขดลวดโรเตอร์แบบกรงกระรอก:
การเหนี่ยวนำการรั่วไหลของขดลวดโรเตอร์:
การเหนี่ยวนำการรั่วไหลของขดลวดโรเตอร์ ลดลงตามจำนวนรอบของสเตเตอร์:
ความต้านทานพื้นฐาน:
พารามิเตอร์ของมอเตอร์แบบอะซิงโครนัสในหน่วยสัมพัทธ์:
ค่าสัมประสิทธิ์โดยคำนึงถึงอิทธิพลของมุมเอียงของร่อง:
ความเหนี่ยวนำการรั่วไหลของเครื่องเมื่อพิจารณาจากช่องเอียง:
แก้ไขค่าสัมประสิทธิ์ เค อี:
ความแตกต่างระหว่าง เค อีและ เค’ อี, (เค อี - เค’ อี )%=((0,948-0,938)/0,948)∙100%=1,1 %.
7 การคำนวณการสูญเสียพลังงานที่ไม่ได้ใช้งาน
น้ำหนักของฟันเหล็กสเตเตอร์:
น้ำหนักเหล็กแอกสเตเตอร์:
สำหรับเหล็กปี 2013 เรายอมรับ
สำหรับเครื่องจักรที่มีกำลังน้อยกว่า 250 กิโลวัตต์ก็ยอมรับ
การสูญเสียหลักที่ด้านหลังของสเตเตอร์:
โดยที่ - การสูญเสียเฉพาะในเหล็ก W / kg;
การสูญเสียหลักในฟันสเตเตอร์:
การสูญเสียหลักในเหล็กสเตเตอร์:
พวกเรายอมรับ k 01 \u003d 1.6, k 02 \u003d 1.6.
แอมพลิจูดของการเหนี่ยวนำเป็นจังหวะในช่องว่างอากาศเหนือครอบฟัน:
การสูญเสียพื้นผิวบนสเตเตอร์:
k01- ค่าสัมประสิทธิ์โดยคำนึงถึงผลกระทบของการรักษาพื้นผิวของหัวฟันสเตเตอร์ต่อการสูญเสียเฉพาะ
การสูญเสียพื้นผิวบนโรเตอร์:
k02- ค่าสัมประสิทธิ์โดยคำนึงถึงผลกระทบของการรักษาพื้นผิวของหัวฟันโรเตอร์ต่อการสูญเสียเฉพาะ
น้ำหนักของฟันโรเตอร์เหล็ก:
ความกว้างของจังหวะของค่าเฉลี่ยของการเหนี่ยวนำแม่เหล็กในฟัน:
การสูญเสียพลังงานกระเพื่อมในฟันของสเตเตอร์:
การสูญเสียการกระเพื่อมในฟันโรเตอร์:
การสูญเสียเพิ่มเติมทั่วไปในเหล็ก:
การสูญเสียพลังงานทั้งหมดในเหล็ก:
การสูญเสียทางกล:
ที่ไหน เคขน- ค่าสัมประสิทธิ์แรงเสียดทานสำหรับเครื่องยนต์ 2p=6
การสูญเสียทางไฟฟ้าในขดลวดสเตเตอร์ที่ไม่ได้ใช้งาน:
ส่วนประกอบที่ใช้งานของกระแสไม่มีโหลดของเครื่องยนต์:
ไม่มีโหลดปัจจุบัน:
ปัจจัยพลังงานที่ไม่ได้ใช้งาน:
8 การคำนวณประสิทธิภาพ
การคำนวณประสิทธิภาพทำตามวงจรสมมูลของมอเตอร์แบบอะซิงโครนัสดังแสดงในรูปที่ 2
รูปที่ 2 - วงจรสมมูลของมอเตอร์แบบอะซิงโครนัส
ปัจจัยการกระจายสเตเตอร์:
ค่าโดยประมาณของพารามิเตอร์วงจรสมมูล:
ความต้านทานไฟฟ้าลัดวงจรคือ:
การสูญเสียเพิ่มเติม:
กำลังทางกลบนเพลามอเตอร์:
ความต้านทานวงจรสมมูล:
ความต้านทานของวงจรการทำงานของวงจรสมมูล:
คะแนนสลิป:
ความเร็วโรเตอร์สูงสุด:
ส่วนประกอบที่ใช้งานและปฏิกิริยาของกระแสสเตเตอร์พร้อมซิงโครนัส
การหมุนของโรเตอร์:
จัดอันดับปัจจุบันของโรเตอร์:
ส่วนประกอบที่ใช้งานและปฏิกิริยาของกระแสสเตเตอร์:
เฟสสเตเตอร์ปัจจุบัน:
ตัวประกอบกำลัง:
การสูญเสียพลังงานในขดลวดสเตเตอร์และโรเตอร์:
กำลังสูญเสียทั้งหมดในเครื่องยนต์:
การใช้พลังงาน:
ประสิทธิภาพ:
เราคำนวณลักษณะการทำงานสำหรับพลังงาน: 0.25∙R 2n; 0.5∙R 2n; 0.75∙R 2n 0.9∙R 2n; 1.0∙P 2n; 1.25∙R 2n ผลการคำนวณสรุปไว้ในตารางที่ 1
ตารางที่ 1 - ประสิทธิภาพของเครื่องยนต์
|
ค่าโดยประมาณ |
พลัง อาร์ 2, อ. |
|||||||
|
R ต่อ, อ. |
||||||||
|
ร’ 2 ,อ. |
||||||||
|
รน,โอห์ม. |
||||||||
|
Zน,โอห์ม. |
||||||||
|
สน, o.u. |
||||||||
|
ฉัน 2'', ก. |
||||||||
|
ฉัน 1a, ก. |
||||||||
|
ตารางที่ 1 ต่อ |
||||||||
|
ฉัน 1p, ก. |
||||||||
|
ฉัน 1, ก. |
||||||||
|
R ผลรวม, อ. |
||||||||
|
อาร์ 1, อ. |
||||||||
|
η , o.u. |
||||||||
|
น, รอบต่อนาที |
||||||||
รูปที่ 3 - ลักษณะการทำงานของเครื่องยนต์ที่ออกแบบ
9 การคำนวณลักษณะเริ่มต้น
ความสูงของแกนในร่องของโรเตอร์:
ลดความสูงของแท่ง:
สำหรับการยอมรับ .
ความลึกของการเจาะกระแสเข้าไปในแกน:
ความกว้างของช่องโรเตอร์ที่ความลึกที่คำนวณได้ของการเจาะกระแสเข้าไปในแกน:
พื้นที่หน้าตัดของแท่งที่ความลึกของการเจาะปัจจุบันที่คำนวณได้:
ค่าสัมประสิทธิ์โดยประมาณของการเพิ่มความต้านทานของแท่ง:
ค่าสัมประสิทธิ์การเพิ่มขึ้นของความต้านทานที่ใช้งานของเฟสของขดลวดโรเตอร์อันเป็นผลมาจากเอฟเฟกต์การเคลื่อนที่ในปัจจุบัน:
ความต้านทานของโรเตอร์ที่ลดลง โดยคำนึงถึงอิทธิพลของเอฟเฟกต์การกระจัดในปัจจุบัน:
การลดลงของการนำแม่เหล็กของการรั่วไหลของสล็อต:
ค่าสัมประสิทธิ์การเปลี่ยนแปลงความต้านทานอุปนัยของเฟสของโรเตอร์ที่คดเคี้ยวจากผลกระทบของเอฟเฟกต์การเคลื่อนที่ในปัจจุบัน:
ค่าของความต้านทานการรั่วไหลแบบเหนี่ยวนำของขดลวดโรเตอร์ลดลงเป็นขดลวดสเตเตอร์โดยคำนึงถึงผลกระทบของการกระจัดในปัจจุบัน:
ปัจจัยการกระจายสเตเตอร์ในโหมดเริ่มต้น:
ค่าสัมประสิทธิ์การต้านทานสเตเตอร์:
พารามิเตอร์ของวงจรสมมูลในโหมดเริ่มต้น:
ความต้านทานเริ่มต้น:
ค่าเบื้องต้นของกระแสโรเตอร์เมื่อเริ่มต้นโดยคำนึงถึงผลกระทบของความอิ่มตัว:
ที่ไหน เค เอ็น- ค่าสัมประสิทธิ์ความอิ่มตัว ใช้เบื้องต้น เค เอ็น=1,6;
แรงแม่เหล็กโดยประมาณของช่องสเตเตอร์และโรเตอร์:
ช่องเปิดเทียบเท่า:
ลดค่าการนำไฟฟ้ารั่วไหลของสล็อต:
ที่ไหน ∆ ขw1= ข 12 - ขw1=2.735 มม;
ค่าสัมประสิทธิ์การนำแม่เหล็กของการกระเจิงของสล็อต:
ค่าสัมประสิทธิ์การนำแม่เหล็กเฉพาะของการกระเจิงที่แตกต่างกัน:
ความต้านทานการเหนี่ยวนำการรั่วไหลโดยประมาณของขดลวดสเตเตอร์:
ค่าความเหนี่ยวนำการรั่วไหลโดยประมาณของขดลวดโรเตอร์ ลดลงเหลือขดลวดสเตเตอร์ โดยคำนึงถึงความอิ่มตัวของกระแสและการกระจัดในปัจจุบัน:
ความต้านทานการสตาร์ทรวมถึงความอิ่มตัวและการกระจัด:
กระแสโรเตอร์โดยประมาณเมื่อเริ่มต้น:
ส่วนประกอบที่ใช้งานและปฏิกิริยาของกระแสสเตเตอร์เมื่อเริ่มต้น:
กระแสสเตเตอร์เมื่อเริ่มต้น:
หลายหลากของกระแสเริ่มต้น:
แรงบิดเริ่มต้น:
อัตราส่วนแรงบิดเริ่มต้น:
เราคำนวณลักษณะเริ่มต้นสำหรับการเลื่อน ส= 1; 0.8; 0.6; 0.4; 0.2; 0.1 ผลการคำนวณสรุปไว้ในตารางที่ 2
ตารางที่ 2 - ลักษณะเริ่มต้นโดยประมาณ
|
โดยประมาณ ขนาด |
ลื่น |
||||||
|
φ ’ |
|||||||
|
ชั่วโมง ,ม. |
|||||||
|
br, ม. |
|||||||
|
คิว อาร์, ม.2. |
|||||||
|
r' 2ξ, โอห์ม. |
|||||||
|
r” 2ξ, โอห์ม. |
|||||||
|
Z nξ, โอห์ม. |
|||||||
|
ฉัน” 2น, ก. |
|||||||
|
ฉัน” 2นน, ก. |
|||||||
|
ฉ, ชม. |
|||||||
|
∆ ขw2, มม. |
|||||||
|
∆λ n1 |
|||||||
|
∆λ n2 |
|||||||
|
λ n1.น |
|||||||
|
ความต่อเนื่องของตารางที่ 2 |
|||||||
|
λ น2ξ.n |
|||||||
|
λ d1.น |
|||||||
|
λ ง 2 . น |
|||||||
|
x” 1น, โอห์ม. |
|||||||
|
x”2ξn, โอห์ม. |
|||||||
|
ร.น, โอห์ม. |
|||||||
|
เอ็กซ์น, โอห์ม. |
|||||||
|
Z nξ.น, โอห์ม. |
|||||||
|
ฉัน” 2นน, ก. |
|||||||
|
ใน.เอ . , ก. |
|||||||
|
ใน.ร . , ก. |
|||||||
|
ฉัน 1 น, ก. |
|||||||
|
มน, N∙m. |
|||||||
รูปที่ 4 - ลักษณะการสตาร์ทของเครื่องยนต์ที่ออกแบบ
มอเตอร์แบบอะซิงโครนัสที่ออกแบบเป็นไปตามข้อกำหนดของ GOST ทั้งในแง่ของตัวบ่งชี้พลังงาน (ประสิทธิภาพและ) และลักษณะการเริ่มต้น
10 การคำนวณความร้อนและการระบายอากาศของมอเตอร์แบบอะซิงโครนัส
สำหรับขดลวดที่มีฉนวนกันความร้อนคลาส B เราใช้ kp=1.15
การสูญเสียทางไฟฟ้าในส่วนช่องของขดลวดสเตเตอร์:
ค่าสัมประสิทธิ์ของการสูญเสียที่เพิ่มขึ้นอยู่ที่ไหน
การสูญเสียทางไฟฟ้าในส่วนหน้าของขดลวดสเตเตอร์:
ขอบเขตโดยประมาณของส่วนตัดขวางของร่องสเตเตอร์:
สำหรับฉนวนกันความร้อนคลาส B เรายอมรับ ยอมรับ.
ความแตกต่างของอุณหภูมิในฉนวนของส่วนสล็อตของสเตเตอร์ที่คดเคี้ยว:
ค่าการนำความร้อนเทียบเท่าเฉลี่ยของฉนวนสล็อตอยู่ที่ไหน
ค่าเฉลี่ยของค่าสัมประสิทธิ์การนำความร้อนของฉนวนภายในของขดลวดหลวมที่ทำจากตัวนำเคลือบโดยคำนึงถึงการรั่วไหลของตัวนำซึ่งกันและกัน
สำหรับ 2p = 6 เราใช้ K = 0.19 สำหรับการยอมรับ
อุณหภูมิพื้นผิวด้านในของแกนสเตเตอร์สูงกว่าอุณหภูมิอากาศภายในเครื่องยนต์:
ที่ไหน เค- ค่าสัมประสิทธิ์โดยคำนึงถึงส่วนหนึ่งของการสูญเสียในแกนสเตเตอร์และในส่วนสล็อตของขดลวดจะถูกส่งผ่านเฟรมโดยตรงไปยังสิ่งแวดล้อม
ค่าสัมประสิทธิ์การถ่ายเทความร้อนจากพื้นผิว
อุณหภูมิลดลงตามความหนาของฉนวนของส่วนหน้า:
ที่ไหน ขจาก.l- ความหนาของฉนวนด้านเดียวของส่วนหน้าของขดลวดหนึ่งอัน
อุณหภูมิพื้นผิวด้านนอกของชิ้นส่วนด้านหน้าสูงเกินอุณหภูมิอากาศภายในเครื่องยนต์:
อุณหภูมิที่เพิ่มขึ้นโดยเฉลี่ยของสเตเตอร์ที่คดเคี้ยวเหนืออุณหภูมิอากาศภายในมอเตอร์:
สำหรับ ชม.= 100 มม.ยอมรับ. สำหรับการยอมรับ
พื้นผิวระบายความร้อนแชสซีเทียบเท่า:
เส้นรอบวงตามเงื่อนไขของส่วนตัดขวางของซี่โครงของตัวเรือนเครื่องยนต์อยู่ที่ไหน
ผลรวมของการสูญเสียในเครื่องยนต์:
ผลรวมของการสูญเสียที่ปล่อยสู่อากาศภายในเครื่องยนต์:
อุณหภูมิอากาศภายในเครื่องยนต์สูงเกินอุณหภูมิแวดล้อม:
ค่าเฉลี่ยของอุณหภูมิที่เพิ่มขึ้นของสเตเตอร์ที่คดเคี้ยวเหนืออุณหภูมิโดยรอบ:
สำหรับเครื่องยนต์ที่มี และ ชม.=100 มม.ยอมรับ.
ค่าสัมประสิทธิ์ที่คำนึงถึงการเปลี่ยนแปลงของสภาวะการทำความเย็นตลอดความยาวของพื้นผิวเคสที่ถูกเป่าโดยพัดลมภายนอก:
การไหลเวียนของอากาศที่จำเป็นสำหรับการระบายความร้อน:
การไหลของอากาศจากพัดลมกลางแจ้ง:
พัดลมให้การไหลของอากาศที่จำเป็น
11 การออกแบบเครื่องยนต์
พร้อมกันกับแท่งและวงแหวนปลาย ใบพัดระบายอากาศถูกหล่อ ขล=3 มม., เอ็นล=9 ชิ้น, ลล=30 มม., ชม.ล=15มม..
เตียงทำจากอลูมิเนียมอัลลอยด์พร้อมซี่โครงขวางตามยาว ขเซนต์=4 มม.. อุปกรณ์เอาท์พุตขึ้นรูปด้านบน
ความสูงของซี่โครง:
จำนวนซี่โครงต่อไตรมาสของพื้นผิวสเตเตอร์:
อุปกรณ์ส่งออกของเครื่องประกอบด้วยกล่องขั้วต่อแบบปิดที่มีแผงขั้วต่อฉนวนอยู่ในนั้น กล่องขั้วต่อมีอุปกรณ์สำหรับยึดสายอินพุต
สำหรับการเป่าภายนอกตัวเรือนจะใช้พัดลมแบบแรงเหวี่ยงแนวรัศมีซึ่งอยู่ที่ปลายเพลาด้านตรงข้ามกับไดรฟ์ พัดลมถูกหุ้มด้วยปลอก ปลอกจากปลายมีตะแกรงสำหรับช่องอากาศเข้า ตัวพัดลมและตัวเครื่องทำจากพลาสติก พัดลมติดตั้งอยู่บนกุญแจ
เส้นผ่านศูนย์กลางภายนอกของพัดลม:
ที่ไหน งบริษัท = ดี เอ+2∙ ขเซนต์\u003d 0.168 + 2 4 10 -3 \u003d 0.176 ม. ;
ความกว้างของใบพัดลม:
จำนวนใบพัด:
ช่วงเวลาที่ส่งอย่างถาวร:
ตามช่วงเวลาที่ได้รับเราเลือกขนาดของเพลา: ง 1 =24 มม.; ล 1 =50มม.; ข 1 =8 มม.; ชม. 1 =7 มม.; ที=4.0 มม.; ง 2 =25 มม.; ง 3 =32 มม..
ตามเส้นผ่านศูนย์กลางที่เลือกสำหรับตลับลูกปืนเพลา ง 2 =25 มม.แบริ่ง 180605 ถูกนำมาใช้
บทสรุป
ผลลัพธ์ของการคำนวณทางแม่เหล็กไฟฟ้าคือมอเตอร์แบบอะซิงโครนัสที่ออกแบบพร้อมโรเตอร์กรงกระรอกที่ตรงตามข้อกำหนดของ GOST ทั้งในแง่ของตัวบ่งชี้พลังงาน (ประสิทธิภาพและ) และในแง่ของลักษณะการเริ่มต้น
การคำนวณความร้อนแสดงให้เห็นว่าพัดลมภายนอกให้การไหลของอากาศที่จำเป็นสำหรับการระบายความร้อนตามปกติ
ในการออกแบบได้เลือกวัสดุของเตียงซึ่งเป็นอลูมิเนียมอัลลอยด์ กรอบทำด้วยซี่โครงตามยาวตามขวาง ขนาดของเพลาคำนวณโดยใช้โมเมนต์ที่ส่งต่อเนื่อง และเลือกตลับลูกปืน 180605
ข้อมูลทางเทคนิคของมอเตอร์เหนี่ยวนำกรงกระรอกที่ออกแบบ: กำลัง P 2 = 2.2 กิโลวัตต์, พิกัดแรงดันไฟฟ้า 230/400 V , จำนวนเสา 2 หน้า = 6 , ความถี่ในการหมุน น=1148 รอบต่อนาทีประสิทธิภาพ η = 0.81,เพาเวอร์แฟกเตอร์ cosφ = 0.74.
รายการแหล่งที่มาที่ใช้
2 การออกแบบเครื่องจักรไฟฟ้า: Proc. สำหรับมหาวิทยาลัย / I.P. Kopylov, B.K. โคลคอฟ รองประธาน Morozkin, B.F. โทคาเรฟ; เอ็ด ไอ.พี. โคปิลอฟ - แก้ไขครั้งที่ 3, รายได้ และพิเศษ - ม.: สูงกว่า. Shk., 2545. - 757p.: ป่วย.
3 สท 02069024.101-2010. ข้อกำหนดทั่วไปและกฎการออกแบบ - Orenburg, 2010. - 93 p.
* ที่มานี้เป็นตัวหลักไม่มีการอ้างอิงเพิ่มเติม
การวาดภาพ
ดาวน์โหลด: คุณไม่มีสิทธิ์ดาวน์โหลดไฟล์จากเซิร์ฟเวอร์ของเรา
กระทรวงศึกษาธิการและวิทยาศาสตร์
สาธารณรัฐคาซัคสถาน
North-Kazakhstan State University ตั้งชื่อตาม ม. โคซีบาเยวา
คณะพลังงานและวิศวกรรมเครื่องกล
ภาควิชาวิศวกรรมพลังงานและเครื่องมือวัด
งานหลักสูตร
ในหัวข้อ: "การออกแบบมอเตอร์แบบอะซิงโครนัสด้วยโรเตอร์กรงกระรอก"
ระเบียบวินัย - "เครื่องจักรไฟฟ้า"
สร้างโดย Kalantyrev
ผู้อำนวยการวิทยาศาสตร์
ด.ต.ศ. เอ็น.วี. แชตคอฟสกายา
เปโตรปาฟลอฟสค์ 2010
การแนะนำ
1. การเลือกขนาดหลัก
2. การกำหนดจำนวนช่องสเตเตอร์, หมุนในเฟสที่คดเคี้ยวของส่วนลวดของสเตเตอร์ที่คดเคี้ยว
4. การคำนวณโรเตอร์
5. การคำนวณวงจรแม่เหล็ก
6. พารามิเตอร์โหมดการทำงาน
7. การคำนวณการสูญเสีย
9. การคำนวณความร้อน
ภาคผนวก ก
บทสรุป
บรรณานุกรม
การแนะนำ
มอเตอร์แบบอะซิงโครนัสเป็นตัวแปลงพลังงานไฟฟ้าหลักเป็นพลังงานกลและเป็นพื้นฐานของไดรฟ์ไฟฟ้าของกลไกส่วนใหญ่ ซีรีส์ 4A ครอบคลุมช่วงพิกัดพลังงานตั้งแต่ 0.06 ถึง 400 กิโลวัตต์ และมีความสูง 17 แกนตั้งแต่ 50 ถึง 355 มม.
ในโครงการหลักสูตรนี้ มีการพิจารณาเครื่องยนต์ต่อไปนี้:
การดำเนินการตามระดับการป้องกัน: IP23;
วิธีทำความเย็น: IC0141
ออกแบบตามวิธีการติดตั้ง: IM1081 - ตามตัวเลขตัวแรก - มอเตอร์ที่ขาพร้อมที่บังปลาย ตามตัวเลขที่สองและสาม - มีเพลาแนวนอนและอุ้งเท้าล่าง บนหลักที่สี่ - ด้วยปลายเพลาทรงกระบอกด้านหนึ่ง
สภาพการทำงานทางภูมิอากาศ: U3 - ตามตัวอักษร - สำหรับสภาพอากาศอบอุ่น ตามรูป - สำหรับการจัดวางในพื้นที่ปิดที่มีการระบายอากาศตามธรรมชาติโดยไม่มีสภาพอากาศที่ควบคุมโดยเทียม ซึ่งความผันผวนของอุณหภูมิและความชื้น การสัมผัสกับทรายและฝุ่น การแผ่รังสีของแสงอาทิตย์จะน้อยกว่าในหินกลางแจ้ง คอนกรีต ไม้ และสถานที่ที่ไม่มีเครื่องทำความร้อนอื่นๆ
1. การเลือกขนาดหลัก
1.1 กำหนดจำนวนเสาคู่:
แล้วจำนวนเสาคือ
1.2 กำหนดความสูงของแกนหมุนแบบกราฟิก: ตามรูปที่ 9.18, b ตามตารางที่ 9.8 กำหนดเส้นผ่านศูนย์กลางภายนอกที่สอดคล้องกับแกนหมุน
1.3 เส้นผ่านศูนย์กลางภายในของสเตเตอร์คำนวณตามสูตร:
ซึ่งค่าสัมประสิทธิ์ถูกกำหนดตามตาราง 9.9
เมื่ออยู่ในช่วงเวลา: ![]() .
.
จากนั้นมาเลือกค่า
1.4 กำหนดการแบ่งเสา:
![]() (1.3)
(1.3)
1.5 พิจารณากำลังที่คำนวณได้ W:
 , (1.4)
, (1.4)
กำลังของเพลามอเตอร์อยู่ที่ไหน W;
- อัตราส่วนของ EMF ของสเตเตอร์ที่คดเคี้ยวกับแรงดันไฟฟ้าที่กำหนดซึ่งสามารถกำหนดโดยประมาณได้จากรูปที่ 9.20 สำหรับ และ , .
ค่าโดยประมาณและจะนำมาจากเส้นโค้งที่สร้างขึ้นตามข้อมูลของเครื่องยนต์ซีรีส์ 4A รูปที่ 9.21 ค. ที่กิโลวัตต์ และ , , และ
![]()
1.6 โหลดแม่เหล็กไฟฟ้า A และ Bd ถูกกำหนดแบบกราฟิกจากเส้นโค้งในรูปที่ 9.23, b. ที่กิโลวัตต์ และ , ![]() , ทล.
, ทล.
1.7 อัตราส่วนการคดเคี้ยว . สำหรับขดลวดสองชั้นที่มี2р>2 ควรใช้ = 0.91–0.92 ยอมรับกันเถอะ .
1.8 กำหนดความเร็วเชิงมุมซิงโครนัสของเพลามอเตอร์ W:
ความเร็วซิงโครนัสอยู่ที่ไหน
1.9 คำนวณความยาวของช่องว่างอากาศ:
 , (1.6)
, (1.6)
ปัจจัยรูปร่างของฟิลด์อยู่ที่ไหน .
1.10 เกณฑ์สำหรับการเลือกที่ถูกต้องของมิติข้อมูลหลัก D และเป็นอัตราส่วนซึ่งควรอยู่ภายในขอบเขตที่อนุญาตของรูปที่ 9.25, ข.
![]() . ค่าของ l อยู่ภายในขีดจำกัดที่แนะนำ ซึ่งหมายความว่ามิติหลักได้รับการกำหนดอย่างถูกต้อง
. ค่าของ l อยู่ภายในขีดจำกัดที่แนะนำ ซึ่งหมายความว่ามิติหลักได้รับการกำหนดอย่างถูกต้อง
2. การกำหนดจำนวนช่องสเตเตอร์, การหมุนเฟสของขดลวดและส่วนตัดขวางของลวดสเตเตอร์ที่คดเคี้ยว
2.1 กำหนดค่าขีดจำกัด: t 1 max และ t 1 min รูปที่ 9.26 สำหรับ และ , , .
2.2 จำนวนช่องสเตเตอร์:
![]() , (2.1)
, (2.1)
![]() (2.2)
(2.2)
สุดท้าย จำนวนสล็อตต้องเป็นจำนวนหลายเท่าของจำนวนสล็อตต่อเสาและเฟส: q ยอมรับตามนั้น
![]() , (2.3)
, (2.3)
โดยที่ m คือจำนวนเฟส
2.3 ในที่สุดเราจะกำหนดส่วนฟันของสเตเตอร์:
![]() (2.4)
(2.4)
2.4 กระแสเบื้องต้นของขดลวดสเตเตอร์
2.5 จำนวนตัวนำที่มีประสิทธิภาพในช่องเสียบ (สมมติ):
![]() (2.6)
(2.6)
2.6 เรายอมรับจำนวนสาขาคู่ขนานแล้ว
![]() (2.7)
(2.7)
2.7 จำนวนรอบสุดท้ายของเฟสที่คดเคี้ยวและฟลักซ์แม่เหล็ก:
![]() , (2.8)
, (2.8)
2.8 กำหนดค่าของโหลดไฟฟ้าและแม่เหล็ก:
![]() (2.11)
(2.11)
ค่าของโหลดไฟฟ้าและแม่เหล็กแตกต่างกันเล็กน้อยจากค่าที่เลือกแบบกราฟิก
2.9 การเลือกความหนาแน่นกระแสที่อนุญาตนั้นคำนึงถึงโหลดเชิงเส้นของมอเตอร์:
ความร้อนของส่วนสล็อตของสเตเตอร์ที่คดเคี้ยวอยู่ที่ไหนเรากำหนดแบบกราฟิก รูปที่ 9.27, ง. เมื่อ .
![]()
2.10 คำนวณพื้นที่หน้าตัดของตัวนำที่มีประสิทธิภาพ:
![]() (2.13)
(2.13)
เรายอมรับแล้ว ตาราง P-3.1 , , .
2.11 ในที่สุดเราจะพิจารณาความหนาแน่นกระแสในขดลวดสเตเตอร์:
3. การคำนวณขนาดของโซนฟันของสเตเตอร์และช่องว่างอากาศ
3.1 ก่อนอื่นเราเลือกการเหนี่ยวนำแม่เหล็กไฟฟ้าในแอกสเตเตอร์ BZ 1 และในสเตเตอร์ฟัน B a . ด้วยตาราง 9.12 ก.
3.2 เลือกเกรดเหล็กปี 2013 ตารางที่ 9.13 และปัจจัยการเติมเหล็กของแกนแม่เหล็กสเตเตอร์และโรเตอร์
3.3 ขึ้นอยู่กับการเหนี่ยวนำที่เลือก เราจะกำหนดความสูงของสเตเตอร์แอกและความกว้างขั้นต่ำของฟัน
3.4 เลือกความสูงของช่องและความกว้างของช่องของร่องกึ่งปิด สำหรับมอเตอร์ที่มีความสูงของเพลา , มม. เราเลือกความกว้างของช่องจากตาราง 9.16 สำหรับ และ , .
3.5 กำหนดขนาดของร่อง:
ความสูงของร่อง:
ขนาดของร่องในแม่พิมพ์ และ:
มาเลือกกันเลย

ความสูงของส่วนลิ่มของร่อง:

รูปที่ 3.1. ร่องของมอเตอร์กรงกระรอกที่ออกแบบ
3.6 กำหนดขนาดของร่องในที่โล่งโดยคำนึงถึงค่าเผื่อสำหรับการผสมและการประกอบแกน: และ ตาราง 9.14:
ความกว้าง และ:
และความสูง:
กำหนดพื้นที่หน้าตัดของฉนวนร่างกายในร่อง:
ความหนาด้านเดียวของฉนวนในร่องอยู่ที่ไหน .
คำนวณพื้นที่หน้าตัดของปะเก็นถึงร่อง:
กำหนดพื้นที่หน้าตัดของร่องสำหรับวางตัวนำ:
3.7 เกณฑ์สำหรับความถูกต้องของขนาดที่เลือกคือปัจจัยการเติมของร่องซึ่งมีค่าประมาณเท่ากับ ![]() .
.
![]() , (3.13)
, (3.13)
ดังนั้นค่าที่เลือกจึงถูกต้อง
4. การคำนวณโรเตอร์
4.1 เลือกความสูงของช่องว่างอากาศ d ตามกราฟในรูปที่ 9.31 สำหรับ และ , .
4.2 เส้นผ่านศูนย์กลางภายนอกของโรเตอร์กรงกระรอก:
4.3 ความยาวของโรเตอร์เท่ากับความยาวของช่องว่างอากาศ: , .
4.4 เราเลือกจำนวนร่องจากตาราง 9.18, .
4.5 กำหนดค่าการแบ่งฟันของโรเตอร์:
![]() (4.2)
(4.2)
4.6 ค่าสัมประสิทธิ์ k B สำหรับการคำนวณเส้นผ่านศูนย์กลางเพลาถูกกำหนดจากตาราง 9.19 สำหรับ และ , .
เส้นผ่านศูนย์กลางภายในของโรเตอร์คือ:
4.7 กำหนดกระแสในแกนโรเตอร์:
โดยที่ k i คือค่าสัมประสิทธิ์ที่คำนึงถึงอิทธิพลของกระแสแม่เหล็กและความต้านทานที่คดเคี้ยวต่ออัตราส่วน เรากำหนดแบบกราฟิกที่ ; ;
ค่าสัมประสิทธิ์การลดลงของกระแสกำหนดโดยสูตร:
จากนั้นกระแสที่ต้องการในแกนโรเตอร์:
4.8 กำหนดพื้นที่หน้าตัดของแท่ง:
ความหนาแน่นกระแสที่อนุญาตอยู่ที่ไหน ในกรณีของเรา ![]() .
.
![]()
4.9 กำหนดร่องของโรเตอร์ตามรูปที่ 9.40 ข. พวกเรายอมรับ , , .
เราเลือกการเหนี่ยวนำแม่เหล็กในฟันโรเตอร์จากช่วงเวลา ![]() ตาราง 9.12 ยอมรับกันเถอะ .
ตาราง 9.12 ยอมรับกันเถอะ .
กำหนดความกว้างของฟันที่อนุญาต:
คำนวณขนาดของร่อง:
ความกว้าง b 1 และ b 2:
![]()
 , (4.9)
, (4.9)
ความสูง ชั่วโมง 1:
คำนวณความสูงรวมของร่องโรเตอร์ h П2:
ระบุพื้นที่หน้าตัดของแท่ง:
![]()
4.10 กำหนดความหนาแน่นกระแสในแท่ง J 2:
![]() (4.13)
(4.13)

รูปที่ 4.1 ร่องของมอเตอร์กรงกระรอกที่ออกแบบ
4.11 คำนวณพื้นที่หน้าตัดของวงแหวนลัดวงจร q cl:
กระแสในวงแหวนอยู่ที่ไหนเรากำหนดโดยสูตร:
![]() ,
,
![]()
4.12 คำนวณขนาดของวงแหวนปิดและเส้นผ่านศูนย์กลางเฉลี่ยของวงแหวน:
![]() (4.18)
(4.18)
ระบุพื้นที่หน้าตัดของวงแหวน:
5. การคำนวณกระแสแม่เหล็ก
5.1 มูลค่าของการเหนี่ยวนำในฟันของโรเตอร์และสเตเตอร์:
![]() , (5.1)
, (5.1)
![]() (5.2)
(5.2)
5.2 คำนวณการเหนี่ยวนำในแอกสเตเตอร์ B a:
5.3 ตรวจสอบการเหนี่ยวนำในแอกของโรเตอร์ Bj:
 , (5.4)
, (5.4)
โดยที่ h "j คือความสูงที่คำนวณได้ของแอกโรเตอร์ m
สำหรับมอเตอร์ที่มี2р≥4ที่มีแกนโรเตอร์พอดีกับบูชหรือบนเพลาครีบ h "j จะถูกกำหนดโดยสูตร:
![]()
5.4 ความเค้นแม่เหล็กของช่องว่างอากาศ F d:
![]() , (5.6)
, (5.6)
โดยที่ k d คือค่าสัมประสิทธิ์ช่องว่างอากาศ เรากำหนดโดยสูตร:
 , (5.7)
, (5.7)
ที่ไหน ![]()
![]()
แรงดันแม่เหล็กช่องว่างอากาศ:
5.5 แรงดันแม่เหล็กของโซนฟันของสเตเตอร์ F z 1:
F z1 =2h z1 H z1 , (5.8)
โดยที่ 2h z1 คือความสูงที่คำนวณได้ของฟันสเตเตอร์ ม.
H z1 จะถูกกำหนดจากตาราง A-1.7 ที่ , ![]() .
.
5.6 แรงดันแม่เหล็กของโซนฟันของโรเตอร์ F z 2:
![]() , (5.9)
, (5.9)
![]() ตาราง P-1.7
ตาราง P-1.7
5.7 คำนวณค่าสัมประสิทธิ์ความอิ่มตัวของโซนฟัน k z:
![]() (5.10)
(5.10)
5.8 ค้นหาความยาวของเส้นแม่เหล็กเฉลี่ยของแอกสเตเตอร์ L a:
5.9 ให้เราพิจารณาความแรงของสนาม H a ที่การเหนี่ยวนำ B a ตามเส้นโค้งการสะกดจิตสำหรับแอกของตารางเกรดเหล็กที่ยอมรับ 2013 P-1.6 ที่ , .
5.10 ค้นหาแรงดันแม่เหล็กของแอกสเตเตอร์ F a:
5.11 กำหนดความยาวของเส้นแม่เหล็กเฉลี่ยของฟลักซ์ในแอกของโรเตอร์ L j:
 , (5.13)
, (5.13)
โดยที่ h j - ความสูงของด้านหลังของโรเตอร์พบได้จากสูตร:
5.12 ความแรงของสนาม H j ระหว่างการเหนี่ยวนำถูกกำหนดจากเส้นโค้งการสะกดจิตของแอกสำหรับตารางเกรดเหล็กที่ยอมรับ P-1.6 ที่ , .
ให้เราตรวจสอบแรงดันแม่เหล็กของแอกโรเตอร์ F j:
5.13 คำนวณแรงดันแม่เหล็กทั้งหมดของวงจรแม่เหล็กของเครื่อง (ต่อคู่เสา) F c:
5.14 ปัจจัยความอิ่มตัวของวงจรแม่เหล็ก:
![]() (5.17)
(5.17)
5.15 กระแสแม่เหล็ก :
ค่าสัมพัทธ์ของกระแสแม่เหล็ก:
![]() (5.19)
(5.19)
6. พารามิเตอร์โหมดการทำงาน
พารามิเตอร์ของเครื่องอะซิงโครนัสคือความต้านทานที่ใช้งานและอุปนัยของขดลวดสเตเตอร์ x 1, r 1, โรเตอร์ r 2, x 2, ความต้านทานของตัวเหนี่ยวนำร่วมกัน x 12 (หรือ x m) และความต้านทานที่คำนวณได้ r 12 (หรือ r m) การแนะนำซึ่งคำนึงถึงผลกระทบของการสูญเสียในเหล็กสเตเตอร์ที่มีต่อลักษณะของมอเตอร์
วงจรเปลี่ยนเฟสของเครื่องแบบอะซิงโครนัสซึ่งขึ้นอยู่กับการนำกระบวนการในเครื่องหมุนไปยังเครื่องที่อยู่กับที่ แสดงไว้ในรูปที่ 6.1 กระบวนการทางกายภาพในเครื่องอะซิงโครนัสจะแสดงให้เห็นชัดเจนยิ่งขึ้นในแผนภาพที่แสดงในรูปที่ 6.1 แต่สำหรับการคำนวณจะสะดวกกว่าที่จะแปลงเป็นวงจรที่แสดงในรูปที่ 6.2

รูปที่ 6.1 วงจรเปลี่ยนเฟสของขดลวดของเครื่องอะซิงโครนัสที่ลดลง

รูปที่ 6.2 แปลงวงจรเทียบเท่าเฟสคดเคี้ยวของเครื่องอะซิงโครนัสที่ลดลง
6.1 ความต้านทานที่ใช้งานของเฟสของขดลวดสเตเตอร์คำนวณโดยสูตร:
![]() , (6.1)
, (6.1)
โดยที่ L 1 คือความยาวรวมของตัวนำที่มีประสิทธิภาพของเฟสที่คดเคี้ยว m;
a คือจำนวนสาขาที่คดเคี้ยวขนานกัน
c 115 - ความต้านทานเฉพาะของวัสดุที่คดเคี้ยว (ทองแดงสำหรับสเตเตอร์) ที่อุณหภูมิการออกแบบ สำหรับทองแดง ![]() ;
;
k r คือค่าสัมประสิทธิ์การเพิ่มขึ้นของความต้านทานที่ใช้งานของเฟสของขดลวดจากผลกระทบของเอฟเฟกต์การกระจัดในปัจจุบัน
ในตัวนำของขดลวดสเตเตอร์ของเครื่องอะซิงโครนัส ผลกระทบของการกระจัดในปัจจุบันไม่มีนัยสำคัญเนื่องจากตัวนำพื้นฐานมีขนาดเล็ก ดังนั้นตามกฎแล้วในการคำนวณเครื่องจักรปกติให้ใช้ k r =1
6.2 ความยาวรวมของตัวนำเฟสที่คดเคี้ยว L 1 คำนวณโดยสูตร:
โดยที่ l cf คือความยาวเฉลี่ยของวงเลี้ยวที่คดเคี้ยว m
6.3 ความยาวเฉลี่ยของขดลวด l cf เป็นผลรวมของส่วนหน้าตรง - ร่องและโค้งของขดลวด:
![]() , (6.3)
, (6.3)
โดยที่ l P คือความยาวของส่วนร่อง เท่ากับความยาวเชิงสร้างสรรค์ของแกนเครื่องจักร ;
l l - ความยาวของส่วนหน้า
6.4 ความยาวของส่วนหน้าของขดลวดของขดลวดสเตเตอร์หลวมถูกกำหนดโดยสูตร:
![]() , (6.4)
, (6.4)
โดยที่ K l - ค่าสัมประสิทธิ์ซึ่งขึ้นอยู่กับจำนวนคู่ของเสาสำหรับตารางที่ 9.23
b CT - ความกว้างเฉลี่ยของขดลวด m ซึ่งกำหนดโดยส่วนโค้งของวงกลมที่ผ่านจุดกึ่งกลางของความสูงของร่อง:
 , (6.5)
, (6.5)
โดยที่ b 1 คือระยะพิทช์ที่คดเคี้ยวของสเตเตอร์ที่สั้นลง มักจะได้รับการยอมรับ
![]()
ค่าสัมประสิทธิ์สำหรับขดลวดหลวมที่วางอยู่ในร่องก่อนที่จะกดแกนเข้าไปในตัวเรือน
ความยาวเฉลี่ย:
ความยาวรวมของตัวนำเฟสคดเคี้ยวที่มีประสิทธิภาพ:
สเตเตอร์ที่คดเคี้ยวเฟสความต้านทานที่ใช้งานอยู่:
![]()
6.5 กำหนดความยาวของการออกไปตามส่วนหน้า:
โดยที่ K out คือค่าสัมประสิทธิ์ที่กำหนดตามตาราง 9.23 ที่ .
6.6 กำหนดค่าสัมพัทธ์ของความต้านทานเฟสของขดลวดสเตเตอร์:
![]() (6.7)
(6.7)
6.7 กำหนดความต้านทานที่ใช้งานของเฟสของขดลวดโรเตอร์ r 2:
โดยที่ r c คือความต้านทานของแท่ง
r cl - ความต้านทานของวงแหวน
6.8 คำนวณความต้านทานของแท่งตามสูตร:
6.9 คำนวณความต้านทานของวงแหวน:
จากนั้นความต้านทานที่ใช้งานของโรเตอร์:
6.10 นำ r 2 มาเป็นจำนวนรอบของขดลวดสเตเตอร์ กำหนด:
6.11 ค่าสัมพัทธ์ของความต้านทานเฟสของขดลวดโรเตอร์
![]() (6.12)
(6.12)
6.12 ความต้านทานอุปนัยของเฟสของขดลวดโรเตอร์:
![]() , (6.13)
, (6.13)
โดยที่ l p คือค่าสัมประสิทธิ์การนำแม่เหล็กของโรเตอร์แบบเจาะรู
จากรูปที่ 9.50 e l p ถูกกำหนดโดยสูตรจากตาราง 9.26:
 , (6.14)
, (6.14)
(ตัวนำถูกยึดด้วยฝาปิดช่องเสียบ)
![]() , (6.15)
, (6.15)
![]()
ค่าสัมประสิทธิ์การกระเจิงด้านหน้าของการนำแม่เหล็ก:
ค่าสัมประสิทธิ์การนำแม่เหล็กของการกระเจิงที่แตกต่างกันกำหนดโดยสูตร:
 , (6.17)
, (6.17)
ซึ่งกำหนดแบบกราฟิกได้ที่ , รูปที่ 9.51, e, .
![]()
ใช้สูตร (6.13) คำนวณความต้านทานอุปนัยของขดลวดสเตเตอร์:
6.13 มากำหนดค่าสัมพัทธ์ของความต้านทานอุปนัยของขดลวดสเตเตอร์:
![]() (6.18)
(6.18)
6.14 ลองคำนวณความต้านทานอุปนัยของเฟสของขดลวดโรเตอร์ตามสูตร:
โดยที่ l p2 คือค่าสัมประสิทธิ์การนำแม่เหล็กของช่องโรเตอร์
l l2 - ค่าสัมประสิทธิ์การนำแม่เหล็กของส่วนหน้าของโรเตอร์
l d2 - ค่าสัมประสิทธิ์การนำแม่เหล็กของการกระเจิงของโรเตอร์
ค่าสัมประสิทธิ์การนำแม่เหล็กของช่องโรเตอร์คำนวณโดยสูตรตามตาราง 9.27:
6.15 ค่าสัมประสิทธิ์การนำแม่เหล็กของส่วนหน้าของโรเตอร์ถูกกำหนดโดยสูตร:
 ,
,
6.16 ค่าสัมประสิทธิ์การนำแม่เหล็กของการกระเจิงที่แตกต่างกันของโรเตอร์ถูกกำหนดโดยสูตร:
 , (6.23)
, (6.23)
ที่ไหน  .
.
![]()
6.17 มาหาค่าของความต้านทานอุปนัยตามสูตร (6.19):
เรานำ x 2 มาเป็นจำนวนรอบของสเตเตอร์:
ค่าสัมพัทธ์ :
![]() (6.25)
(6.25)
7. การคำนวณการสูญเสีย
7.1 คำนวณการสูญเสียหลักในเหล็กสเตเตอร์ของเครื่องอะซิงโครนัสตามสูตร:
 , (7.1)
, (7.1)
การสูญเสียที่เฉพาะเจาะจงอยู่ที่ไหน ![]() ตาราง 9.28;
ตาราง 9.28;
b - เลขชี้กำลังสำหรับเกรดเหล็กปี 2013
k ใช่ และ k d z - ค่าสัมประสิทธิ์ที่คำนึงถึงผลกระทบต่อการสูญเสียในเหล็ก สำหรับเกรดเหล็กปี 2013 , ;
m a - มวลของแอก คำนวณตามสูตร:
ที่ไหน ![]() คือค่าความถ่วงจำเพาะของเหล็ก
คือค่าความถ่วงจำเพาะของเหล็ก
น้ำหนักของฟันสเตเตอร์:
7.2 คำนวณการสูญเสียพื้นผิวทั้งหมดในโรเตอร์:
ที่ไหน p sur2 - การสูญเสียพื้นผิวเฉพาะกำหนดโดยสูตร:
 , (7.5)
, (7.5)
โดยที่คือค่าสัมประสิทธิ์ที่คำนึงถึงผลกระทบของการรักษาพื้นผิวของหัวฟันของโรเตอร์ต่อการสูญเสียเฉพาะ
В 02 - ความกว้างของระลอกคลื่นเหนี่ยวนำในช่องว่างอากาศกำหนดโดยสูตร:
ซึ่งกำหนดแบบกราฟิกในรูปที่ 9.53 ข.
7.3 คำนวณการสูญเสียพื้นผิวเฉพาะตามสูตร (7.5):
7.4 คำนวณการสูญเสียจังหวะในฟันโรเตอร์:
 , (7.7)
, (7.7)
โดยที่ m z 2 คือมวลของเหล็กของฟันโรเตอร์
В pool2 คือแอมพลิจูดของการเต้นของแม่เหล็กในโรเตอร์
![]() , (7.9)
, (7.9)
7.5 กำหนดจำนวนการสูญเสียเพิ่มเติมในเหล็ก:
7.6 การสูญเสียเหล็กทั้งหมด:
7.7 เรามานิยามการสูญเสียเชิงกลกัน:
ที่ไหน เมื่อไร ตามตาราง 9.29 .
7.8 คำนวณการสูญเสียเพิ่มเติมในโหมดระบุ:
7.9 กระแสไม่มีโหลดของมอเตอร์:
![]() , (7.14)
, (7.14)
ที่ฉัน x.x.a. - ส่วนประกอบที่ใช้งานอยู่ของกระแสที่ไม่มีโหลดกำหนดโดยสูตร:
โดยที่ Р e.1 x.x. - การสูญเสียทางไฟฟ้าในสเตเตอร์ที่ไม่ได้ใช้งาน:
7.10 กำหนดตัวประกอบกำลังที่ไม่ได้ใช้งาน:
![]() (7.17)
(7.17)
8. การคำนวณประสิทธิภาพ
8.1 กำหนดส่วนที่แท้จริงของแนวต้าน:
![]() (8.1)
(8.1)
![]() (8.2)
(8.2)
8.3 ค่าคงที่ของมอเตอร์:
![]() , (8.3)
, (8.3)
 (8.4)
(8.4)
8.4 กำหนดองค์ประกอบที่ใช้งานของกระแส:
8.5 กำหนดปริมาณ:
8.6 การสูญเสียที่ไม่เปลี่ยนแปลงด้วยการเปลี่ยนแปลงในสลิป:
ยอมรับ ![]() และคำนวณประสิทธิภาพโดยมีสลิปเท่ากับ: 0.005; 0.01; 0.015; 0.02; 0.0201. เราเขียนผลลัพธ์ของการคำนวณในตาราง 8.1
และคำนวณประสิทธิภาพโดยมีสลิปเท่ากับ: 0.005; 0.01; 0.015; 0.02; 0.0201. เราเขียนผลลัพธ์ของการคำนวณในตาราง 8.1
P 2n \u003d 110 กิโลวัตต์; คุณ 1n \u003d 220/380 V; 2p \u003d 10 ฉัน 0 a \u003d 2.74 A; ฉัน 0 p \u003d ฉัน m \u003d 61.99 A;
P c t + P fur \u003d 1985.25 W; r 1 \u003d 0.0256 โอห์ม; r ¢ 2 \u003d 0.0205 โอห์ม; ค 1 = 1.039;
ก ¢=1.0795; a=0.0266 โอห์ม; ข ¢ = 0; b=0.26 โอห์ม
ตารางที่ 8.1
ลักษณะการทำงานของมอเตอร์แบบอะซิงโครนัส
| สูตรคำนวณ |
สลิป |
|||||
|
|
||||||
|
|
||||||
|
|
||||||

รูปที่ 8.1 กำลังเครื่องยนต์กับกำลัง P 2

รูปที่ 8.2 กราฟประสิทธิภาพเครื่องยนต์เทียบกับกำลัง P 2

รูปที่ 8.3 กราฟสลิปมอเตอร์ s เทียบกับกำลัง P 2

รูปที่ 8.4 กราฟของการพึ่งพากระแสสเตเตอร์ I 1 ของเครื่องยนต์บนกำลัง P 2
9. การคำนวณความร้อน
9.1 พิจารณาอุณหภูมิที่เพิ่มขึ้นของพื้นผิวด้านในของแกนสเตเตอร์เหนืออุณหภูมิอากาศภายในเครื่องยนต์:
 , (9.1)
, (9.1)
ที่ไหน และระดับการป้องกัน IP23 ตารางที่ 9.35;
a 1 - ค่าสัมประสิทธิ์การถ่ายเทความร้อนจากพื้นผิวเราจะกำหนดแบบกราฟิก รูปที่ 9.68, b, ![]() .
.
 , (9.2)
, (9.2)
โดยที่ค่าสัมประสิทธิ์การสูญเสียเพิ่มขึ้นสำหรับคลาสการต้านทานความร้อน F .
![]() ,
,
9.2 ความแตกต่างของอุณหภูมิในฉนวนของส่วนช่องของขดลวดสเตเตอร์:
 , (9.4)
, (9.4)
โดยที่ P p1 คือเส้นรอบวงของหน้าตัดของร่องสเตเตอร์ เรากำหนดโดยสูตร:
l เทียบเท่า – ค่าการนำความร้อนเทียบเท่าเฉลี่ยของส่วนร่อง สำหรับคลาสการต้านทานความร้อน F ![]() , หน้า 452;
, หน้า 452;
- ค่าเฉลี่ยของค่าสัมประสิทธิ์การนำความร้อนของฉนวนภายใน กำหนดแบบกราฟิกที่ ![]() ,
, ![]() รูปที่ 9.69
รูปที่ 9.69
9.3 กำหนดความแตกต่างของอุณหภูมิตามความหนาของฉนวนของส่วนหน้า:
 , (9.6)
, (9.6)
ที่ไหน , ![]() .
.
ดังนั้นส่วนหน้าของขดลวดสเตเตอร์จึงไม่แยกออกจากกัน
9.4 คำนวณอุณหภูมิส่วนเกินของพื้นผิวด้านนอกของส่วนหน้าเหนืออุณหภูมิอากาศภายในเครื่อง:
9.5 กำหนดอุณหภูมิที่เพิ่มขึ้นโดยเฉลี่ยของสเตเตอร์ที่คดเคี้ยวเหนืออุณหภูมิอากาศภายในเครื่อง:
 (9.8)
(9.8)
9.6 คำนวณค่าเฉลี่ยส่วนเกินของอุณหภูมิอากาศภายในเครื่องมากกว่าอุณหภูมิแวดล้อม:
โดยที่ a ใน - เรากำหนดแบบกราฟิก รูปที่ 9.68 ![]() ;
;
- ผลรวมของการสูญเสียที่ปล่อยสู่อากาศภายในเครื่องยนต์:
การสูญเสียทั้งหมดในมอเตอร์อยู่ที่โหมดระบุที่ไหน
P e1 - การสูญเสียทางไฟฟ้าในสเตเตอร์ที่คดเคี้ยวในโหมดปกติ
P e2 - การสูญเสียทางไฟฟ้าในขดลวดโรเตอร์ในโหมดปกติ
 , (9.12)
, (9.12)
โดยที่ S คร. เป็นพื้นที่ผิวของเฟรม
P p ถูกกำหนดแบบกราฟิก เมื่อ รูปที่ 9.70 .
![]()
9.7 กำหนดอุณหภูมิที่เพิ่มขึ้นโดยเฉลี่ยของสเตเตอร์ที่คดเคี้ยวเหนืออุณหภูมิโดยรอบ:
9.8 กำหนดการไหลของอากาศที่จำเป็นสำหรับการระบายอากาศ:
![]() (9.14)
(9.14)
9.9 การไหลของอากาศจากพัดลมกลางแจ้งที่มีการออกแบบและขนาดที่ใช้ในซีรีส์ 4A สามารถกำหนดโดยประมาณได้จากสูตร:
![]() , (9.15)
, (9.15)
ที่ไหน และ - จำนวนและความกว้าง, m, ของท่อระบายอากาศในแนวรัศมี, หน้า 384;
n - ความเร็วรอบเครื่องยนต์, รอบต่อนาที;
ค่าสัมประสิทธิ์สำหรับมอเตอร์ที่มี .
เหล่านั้น. การไหลของอากาศจากพัดลมกลางแจ้งนั้นมากกว่าการไหลของอากาศที่จำเป็นในการระบายอากาศของมอเตอร์
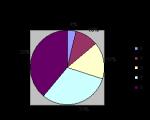
10. การคำนวณประสิทธิภาพของแผนภูมิวงกลม
10.1 ขั้นแรก กำหนดกระแสซิงโครนัสที่ไม่มีโหลดโดยใช้สูตร:
10.2 คำนวณความต้านทานไฟฟ้าลัดวงจรแบบแอคทีฟและแบบเหนี่ยวนำ:
10.3 คำนวณขนาดของแผนภูมิวงกลม:
ขนาดปัจจุบันคือ:
โดยที่ D ถึง - เส้นผ่านศูนย์กลางของวงกลมของไดอะแกรมถูกเลือกจากช่วงเวลา: ![]() , เลือก .
, เลือก .
ระดับพลังงาน:
สเกลโมเมนต์:
![]() (10.6)
(10.6)
แผนภูมิวงกลมของมอเตอร์แสดงไว้ด้านล่าง วงกลมที่มีเส้นผ่านศูนย์กลาง D ถึงศูนย์กลาง O ¢ คือตำแหน่งที่ปลายของเวกเตอร์กระแสสเตเตอร์ของมอเตอร์ที่สลิปต่างๆ จุด A 0 กำหนดตำแหน่งของจุดสิ้นสุดของเวกเตอร์ปัจจุบัน I 0 ที่รอบเดินเบาแบบซิงโครนัสและ - ที่รอบเดินเบาจริงของเครื่องยนต์ ส่วนของเส้น , เท่ากับค่าสัมประสิทธิ์พลังงานที่ไม่ได้ใช้งาน จุด A 3 กำหนดตำแหน่งของจุดสิ้นสุดของเวกเตอร์ปัจจุบันของสเตเตอร์ในกรณีที่ไฟฟ้าลัดวงจร (s=1) ส่วนนี้คือกระแส I ลัดวงจร และมุมคือ จุด A 2 กำหนดตำแหน่งของจุดสิ้นสุดของเวกเตอร์ปัจจุบันของสเตเตอร์ที่
จุดกึ่งกลางบนส่วนโค้ง A 0 A 3 กำหนดตำแหน่งของจุดสิ้นสุดของเวกเตอร์ปัจจุบัน I 1 ที่โหลดต่างๆ ในโหมดมอเตอร์ แกน abscissa ของไดอะแกรม OB คือเส้นของกำลังหลัก P 1 . เส้นของพลังงานแม่เหล็กไฟฟ้า R em หรือโมเมนต์แม่เหล็กไฟฟ้า M em คือเส้น A 0 A 2 เส้นกำลังที่มีประโยชน์บนเพลา (กำลังรอง P 2) คือเส้น A ’ 0 A 3

รูปที่ 10.1 แผนภูมิวงกลม
บทสรุป
ในโครงการหลักสูตรนี้ ได้ออกแบบมอเตอร์ไฟฟ้าแบบอะซิงโครนัสพร้อมโรเตอร์แบบกรงกระรอก จากการคำนวณทำให้ได้รับตัวบ่งชี้หลักสำหรับเครื่องยนต์ที่มีกำลัง h และ cosj ซึ่งเป็นไปตามค่าสูงสุดของ GOST ที่อนุญาตสำหรับชุดเครื่องยนต์ 4A ทำการคำนวณและสร้างลักษณะการทำงานของเครื่องจักรที่ออกแบบ
ดังนั้นจากข้อมูลการคำนวณ เอ็นจิ้นนี้สามารถระบุได้ดังต่อไปนี้ เครื่องหมาย:
4 – หมายเลขซีเรียลของซีรีส์
A - ประเภทของเครื่องยนต์ - อะซิงโครนัส
315 - ความสูงของแกนหมุน
M - ความยาวตามเงื่อนไขของเตียงตาม IEC
10 - จำนวนเสา
U - การออกแบบภูมิอากาศสำหรับสภาพอากาศอบอุ่น
ข้อมูลการจัดอันดับของมอเตอร์ที่ออกแบบ:
P 2n = 110 kW, U 1n = 220/380 V, I 1n = 216 A, cosj n = 0.83, hn = 0.93
บรรณานุกรม
1. การออกแบบเครื่องจักรไฟฟ้า: Proc. สำหรับมหาวิทยาลัย / P79
ไอ.พี. Kopylov, B.K. โคลคอฟ รองประธาน Morozkin, B.F. โทคาเรฟ; เอ็ด ไอ.พี. โคปิลอฟ – แก้ไขครั้งที่ 4 และเพิ่มเติม - ม.: สูงกว่า. โรงเรียน พ.ศ. 2548 - 767 น.: ป่วย
2. Voldek A.I. , Popov V.V. รถยนต์ไฟฟ้า. เครื่อง AC: หนังสือเรียนสำหรับโรงเรียนมัธยม - เซนต์ปีเตอร์สเบิร์ก: - ปีเตอร์ 2550 -350 น.
3. Katsman M.M. คู่มือการใช้เครื่องไฟฟ้า: หนังสือเรียนสำหรับนักศึกษาการศึกษา. สถาบันขนาดกลาง ศ. การศึกษา / Mark Mikhailovich Katsman - ม.: สำนักพิมพ์ "สถาบันการศึกษา", 2548. - 480 น.
ภาคผนวก ก
(บังคับ)

รูปที่ 1 รูปแบบของขดลวดสองชั้นที่มีระยะพิทช์สั้นลง , ,
FSBEI HPE "มหาวิทยาลัยแห่งรัฐอูกรา"
กรมพลังงาน
Karminskaya T.D. , Kovalev V.Z. , Bespalov A.V. , Shcherbakov A.G.
รถยนต์ไฟฟ้า
กวดวิชา
เพื่อดำเนินการออกแบบหลักสูตร
ระเบียบวินัย "เครื่องจักรไฟฟ้า"
สำหรับการศึกษาระดับปริญญาตรี
ทิศทางการจัดทำ 13.03.02 "อุตสาหกรรมพลังงานไฟฟ้าและวิศวกรรมไฟฟ้า"
Khanty-Mansiysk 2013
บทช่วยสอนนี้อธิบายถึงวิธีการในการออกแบบมอเตอร์แบบอะซิงโครนัสด้วยโรเตอร์แบบกรงกระรอก ซึ่งจำเป็นต่อการทำงานออกแบบหลักสูตรให้เสร็จสมบูรณ์ ในระหว่างการออกแบบหลักสูตร งานต่างๆ เช่น การเลือกขนาดหลักของมอเตอร์ การคำนวณพารามิเตอร์และระบบแม่เหล็กของขดลวดสเตเตอร์ การคำนวณพารามิเตอร์และระบบแม่เหล็กของขดลวดโรเตอร์ การกำหนดพารามิเตอร์ของวงจรสมมูล และการสร้างคุณสมบัติทางกลและสมรรถนะของมอเตอร์เหนี่ยวนำได้รับการแก้ไข
ตำรานี้รวบรวมตามโปรแกรมการทำงานของหลักสูตร "เครื่องจักรไฟฟ้า" สำหรับนักเรียนในทิศทาง 13.03.02 "พลังงานไฟฟ้าและวิศวกรรมไฟฟ้า" ซึ่งจะเป็นประโยชน์สำหรับนักศึกษาสาขาไฟฟ้าและเครื่องกลไฟฟ้าและสาขาเฉพาะทางอื่นๆ ตลอดจนผู้เชี่ยวชาญที่เกี่ยวข้องกับการวิจัย การออกแบบ และการทำงานของเครื่องอะซิงโครนัสเพื่อวัตถุประสงค์ต่างๆ
การแนะนำ
ข้อมูลเบื้องต้นสำหรับการออกแบบ
ตัวเลือกงานสำหรับการออกแบบ
บทที่ 1 ระเบียบวิธีการออกแบบมอเตอร์เหนี่ยวนำแบบกรงกระรอก
1.1. การเลือกขนาดเครื่องยนต์หลัก
1.2. การคำนวณพารามิเตอร์ขดลวดสเตเตอร์
1.3. การคำนวณช่องว่างอากาศ
1.4. การคำนวณพารามิเตอร์ของขดลวดโรเตอร์
1.5. การคำนวณกระแสแม่เหล็ก
1.6. การคำนวณพารามิเตอร์ของโหมดการทำงานของเครื่องยนต์
1.7. การคำนวณการสูญเสียที่ใช้งานอยู่ในมอเตอร์
1.8. การคำนวณประสิทธิภาพเครื่องยนต์
1.9. การคำนวณลักษณะเริ่มต้น
บทที่ 2
2.1. คำอธิบายของโปรแกรม AD-KP
2.2. ตัวอย่างการใช้งานโปรแกรม AD - KP
บทสรุป
แอพ
บรรณานุกรม
การแนะนำ.
เครื่องอะซิงโครนัสเป็นเครื่อง AC แบบไม่มีแปรงซึ่งอัตราส่วนของความเร็วโรเตอร์ต่อความถี่ของกระแสในวงจรที่เครื่องเชื่อมต่อขึ้นอยู่กับโหลด เช่นเดียวกับเครื่องจักรไฟฟ้า เครื่องอะซิงโครนัสมีคุณสมบัติย้อนกลับได้ เช่น สามารถทำงานได้ทั้งในโหมดมอเตอร์และเจนเนอเรเตอร์ อย่างไรก็ตามในทางปฏิบัติโหมดการทำงานของมอเตอร์ที่แพร่หลายที่สุดคือโหมดการทำงานของเครื่อง วันนี้ มอเตอร์แบบอะซิงโครนัสเป็นกลไกหลักของกลไกและเครื่องจักรส่วนใหญ่ มากกว่า 60% ของพลังงานไฟฟ้าที่สร้างขึ้นทั้งหมดถูกใช้โดยเครื่องจักรไฟฟ้า ในขณะที่การใช้พลังงานส่วนใหญ่นี้ (ประมาณ 75%) ประกอบด้วยมอเตอร์แบบอะซิงโครนัส มอเตอร์แบบอะซิงโครนัสแพร่หลายค่อนข้างมากเนื่องจากข้อได้เปรียบดังต่อไปนี้: ขนาดโดยรวมที่เล็ก, ความเรียบง่ายของการออกแบบ, ความน่าเชื่อถือสูง, ประสิทธิภาพสูง, ต้นทุนค่อนข้างต่ำ ข้อเสียของมอเตอร์แบบอะซิงโครนัสรวมถึง: ความยากลำบากในการควบคุมความเร็วของการหมุน, กระแสเริ่มต้นจำนวนมาก, ตัวประกอบกำลังต่ำเมื่อเครื่องทำงานในโหมดใกล้กับรอบเดินเบา ข้อเสียประการที่หนึ่งและประการที่สองสามารถชดเชยได้ด้วยการใช้ตัวแปลงความถี่ซึ่งการใช้งานได้ขยายขอบเขตของเครื่องอะซิงโครนัส ต้องขอบคุณตัวแปลงความถี่ มอเตอร์แบบอะซิงโครนัสจึงถูกนำไปใช้อย่างแพร่หลายในพื้นที่ที่เครื่องจักรไฟฟ้าประเภทอื่นๆ เคยใช้มาแต่ดั้งเดิม โดยส่วนใหญ่เป็นเครื่อง DC
เนื่องจากมอเตอร์อะซิงโครนัสที่มีอยู่มีลักษณะข้อบกพร่องหลายประการ เมื่อเวลาผ่านไป มอเตอร์อะซิงโครนัสซีรีส์ใหม่จึงได้รับการพัฒนาอย่างต่อเนื่องซึ่งมีตัวบ่งชี้ทางเทคนิคและเศรษฐกิจที่สูงกว่าเมื่อเทียบกับมอเตอร์อะซิงโครนัสซีรีส์ก่อนหน้า ประสิทธิภาพที่ดีขึ้นและคุณสมบัติเชิงกลในแง่ของคุณภาพ . นอกจากนี้ มักจะมีความจำเป็นสำหรับการพัฒนาและความทันสมัยของมอเตอร์แบบอะซิงโครนัสสำหรับวัตถุประสงค์พิเศษ เครื่องยนต์เหล่านี้ประกอบด้วย:
มอเตอร์อะซิงโครนัสใต้น้ำ (SEM) ใช้เพื่อขับเคลื่อนการติดตั้งปั๊มจุ่มไฟฟ้า (ESP) คุณลักษณะของการออกแบบเครื่องยนต์ดังกล่าวคือขนาดเส้นผ่านศูนย์กลางภายนอกที่ จำกัด ซึ่งมีขนาดที่กำหนดโดยเส้นผ่านศูนย์กลางของท่อที่เครื่องยนต์ตั้งอยู่ นอกจากนี้ เครื่องยนต์ยังทำงานที่อุณหภูมิสูงเพียงพอ ซึ่งส่งผลให้กำลังที่พัฒนาลดลง สถานการณ์เหล่านี้จำเป็นต้องมีการพัฒนาการออกแบบพิเศษของมอเตอร์แบบอะซิงโครนัส
มอเตอร์ที่ทำงานร่วมกับตัวแปลงความถี่ที่ทำหน้าที่ควบคุม เนื่องจากตัวแปลงความถี่นำไปสู่การสร้างส่วนประกอบฮาร์มอนิกทั้งหมดในกราฟแรงดันไฟฟ้าของแหล่งจ่ายมอเตอร์ การมีอยู่ของส่วนประกอบฮาร์มอนิกทำให้สูญเสียเพิ่มเติมในมอเตอร์ และลดประสิทธิภาพให้ต่ำกว่าค่าเล็กน้อย การออกแบบมอเตอร์แบบอะซิงโครนัสที่ทำงานร่วมกับตัวแปลงความถี่ต้องคำนึงถึงคุณสมบัตินี้ และการมีฮาร์โมนิกส์ที่สูงขึ้นในกราฟแรงดันแหล่งจ่ายไม่ควรนำไปสู่การสูญเสียพลังงานเพิ่มเติม
รายการมอเตอร์แบบอะซิงโครนัสที่ระบุของการดำเนินการพิเศษสามารถดำเนินการต่อได้และจากที่นี่เราสามารถสรุปได้ดังต่อไปนี้:
มีความจำเป็นต้องพัฒนามอเตอร์อะซิงโครนัสซีรีส์ใหม่
มีความจำเป็นต้องเชี่ยวชาญวิธีการที่มีอยู่สำหรับการออกแบบมอเตอร์แบบอะซิงโครนัสเพื่อแก้ปัญหาข้างต้น
มีความจำเป็นต้องพัฒนาวิธีการใหม่ในการออกแบบมอเตอร์แบบอะซิงโครนัส โดยใช้เวลาน้อยลงในการออกแบบ เพื่อพัฒนามอเตอร์แบบอะซิงโครนัสชุดใหม่ที่มีตัวบ่งชี้ทางเทคนิคและเศรษฐกิจที่ดีขึ้น
วัตถุประสงค์ของการทำงานสำหรับการออกแบบหลักสูตรคือการพัฒนามอเตอร์แบบอะซิงโครนัสที่มีโรเตอร์แบบกรงกระรอก ซึ่งมีพารามิเตอร์ที่ระบุ โดยอิงตามวิธีปฏิบัติที่มีอยู่และใช้กันอย่างแพร่หลายในการออกแบบมอเตอร์แบบอะซิงโครนัส
ข้อมูลเบื้องต้นสำหรับการออกแบบ
มอเตอร์แบบอะซิงโครนัสที่พัฒนาด้วยโรเตอร์แบบกรงกระรอกจะต้องมีข้อมูลหนังสือเดินทางดังต่อไปนี้:
จัดอันดับ (เฟส) แรงดันไฟฟ้า U 1nf, V;
ความถี่แรงดันไฟฟ้าของแหล่งจ่ายไฟหลัก f 1 , Hz;
จำนวนเฟสแรงดันไฟฟ้า m 1
กำลังไฟ R 2, กิโลวัตต์;
ความเร็วในการหมุนแบบซิงโครนัส n 1 , รอบต่อนาที;
ค่าประสิทธิภาพที่กำหนด η (ไม่น้อยกว่า), rel. หน่วย;
ค่าที่กำหนดของตัวประกอบกำลัง cos(φ) (ไม่น้อยกว่า), rel. หน่วย;
การดำเนินการตามโครงสร้าง
การดำเนินการตามวิธีการป้องกันจากอิทธิพลของสิ่งแวดล้อม
ในระหว่างการออกแบบหลักสูตร จำเป็นต้องออกแบบมอเตอร์อะซิงโครนัสกับโรเตอร์กรงกระรอกที่มีข้อมูลพาสปอร์ตที่ระบุ และเปรียบเทียบตัวบ่งชี้หลักของมอเตอร์อะซิงโครนัสที่ได้รับกับมอเตอร์ที่คล้ายกันซึ่งผลิตโดยอุตสาหกรรม (เช่น อะนาล็อกพิจารณามอเตอร์แบบอะซิงโครนัสของซีรีย์ AIR ข้อมูลหนังสือเดินทางที่ให้ไว้ในภาคผนวก 1)
ควรแสดงผลลัพธ์ของการคำนวณในรูปแบบของบันทึกอธิบาย
สร้างภาพวาดของมอเตอร์แบบอะซิงโครนัสที่พัฒนาขึ้นและนำเสนอในรูปแบบ A1
หมายเหตุ: ให้ กวดวิชาในการออกแบบหลักสูตรจะทำในรูปแบบของสมุดงานซึ่งสามารถใช้เป็นแบบจำลองสำหรับการคำนวณในรูปแบบของบันทึกอธิบาย นอกจากนี้ยังมีตัวอย่างการคำนวณของมอเตอร์แบบอะซิงโครนัสกับโรเตอร์แบบกรงกระรอก ซึ่งมีข้อมูลเริ่มต้นดังต่อไปนี้:
|
n 1 รอบต่อนาที |
อย่างน้อย |
คอส(φ), r.u. อย่างน้อย |
|||||
การออกแบบ – IM1001;
การดำเนินการตามวิธีการป้องกันจากอิทธิพลของสิ่งแวดล้อม - IP44;
งานที่หลากหลายสำหรับการออกแบบ
|
หมายเลขตัวแปร |
ข้อมูลเบื้องต้นสำหรับการออกแบบ |
||||||
|
n 1 รอบต่อนาที |
อย่างน้อย | ||||||
สำหรับตัวเลือกงานทั้งหมด ข้อมูลพาสปอร์ตต่อไปนี้ของเครื่องยนต์ที่ออกแบบจะมีค่าเหมือนกัน:
แรงดันไฟฟ้า (ค่าเฟส) U 1fn, V - 220;
ความถี่แรงดันไฟฟ้า f 1, Hz - 50;
จำนวนเฟสแรงดันไฟฟ้า m 1 - 3;
ออกแบบ IM1001;
การดำเนินการตามวิธีการป้องกันอิทธิพลต่อสิ่งแวดล้อม IP44